
上科大信息学院自动化与机器人中心
ShanghaiTech Automation and Robotics Center
上海科技大学信息科学与技术学院(以下简称“信息学院”)信息学院以中国科学院的科研平台为支撑,聚焦人工智能、芯片(含计算机架构、电路与器件)、可视计算、大数据、量子通信与计算、云计算与边缘计算、金融科技、无人驾驶、电动汽车、新能源、智能医学等涉及信息科学与技术的前沿和交叉研究领域。学院下设七大研究中心:视觉与数据智能中心、智能网络中心、后摩尔器件与集成系统中心、智慧电气科学中心、自动化与机器人中心、系统与安全中心、智能医学信息研究中心。
自动化与机器人中心(STAR Center)致力于聚焦具身智能与机器人系统前沿领域,深耕感知、学习、交互、控制全链条核心技术,深入探索AI与机器人融合的未来,攻克下一代智能机器人的关键难题。中心汇集了多学科交叉融合的研究团队,包括人工智能,计算机视觉,多模态大模型,具身智能,世界模型,控制与优化,机械,生物学等领域。
● 推文看点 中心定位|研究版图|科研成果|教师团队|国际合作与学生培养
● 关键词 具身智能|机器人系统|空间智能|多智能体|智能控制|事件视觉|人机交互
# 01 #
STAR 是什么?

自动化与机器人中心(ShanghaiTech Automation and Robotics Center,STAR)面向具身智能与机器人系统的前沿发展,围绕“感知—控制—学习—交互”四个关键环节,构建从环境理解、智能决策到自主行动和人机协同的完整研究体系。
中心关注的不只是让机器人“看见”或“运动”,更关注智能体能否在真实、开放和动态环境中持续理解任务、作出决策、与人或其他智能体协作,并在执行过程中不断学习。研究对象覆盖移动机器人、人形机器人、无人机、医疗机器人、微纳机器人、仿生机器人和智能交通系统等多种形态。

# 02 #
研究版图:感知、控制、学习与交互协同演进

STAR 的研究版图由四条相互耦合的技术主线构成。它们共同支撑机器人从信息获取走向自主决策,从单体执行走向群体协同,并进一步面向复杂场景中的长期任务。
研究主线速览
● 智能感知:研究多模态感知、空间智能、时空感知与协作感知,使机器人能够理解自身状态、周围环境及人与物之间的关系。
● 控制与优化:围绕多智能体系统、分布式控制与优化、集成计算和多接触运动,提升复杂系统的稳定性、协同性与实时性。
● 学习与推理:发展多模态大模型、模仿学习、强化学习、长思维链推理与“边做边学”机制,增强机器人面对新任务和新环境时的泛化能力。
● 智能交互:面向人机交互、人机协同、长程任务执行及高动态复杂场景实时交互,探索更自然、更可靠的智能系统。
# 03 #
研究生态:从基础方法到多形态机器人系统

STAR 汇聚计算机视觉、机器人学、自动控制、机器学习、优化理论、人工智能与生物医学工程等多学科力量。中心成员的研究方向既覆盖空间感知、SLAM、多模态大模型和事件视觉等基础能力,也延伸至多智能体博弈、分布式优化、机器人操作、仿生运动、声驱动技术和医疗机器人等系统方向。
这种跨方向协同,使中心能够围绕同一真实任务形成完整技术链:前端负责获取和理解环境信息,中间层完成规划、控制与决策,执行端则通过机器人本体与环境交互,并将反馈继续用于模型更新。
据中心材料介绍,STAR 平均每年在大模型、具身智能、机器人、控制系统和计算机视觉等领域发表顶级期刊与会议论文百余篇,研究成果覆盖救援机器人、人形机器人、空间智能、智能交通、室内机器人、新型传感器、无人机、空地协同系统、具身智能 VLA 模型及人机交互等方向。
从感知、控制到具身系统
在空间感知与自主导航方向,中心围绕三维视觉、场景理解、定位与建图、事件相机和空地协同感知开展研究,使移动机器人和无人机能够在室内外复杂环境中完成定位、重建、导航与任务规划。
在具身操作与人形机器人方向,中心研究触觉感知、遥操作、模仿学习、强化学习和多接触运动等方法,探索机器人如何在接触丰富、任务开放的环境中完成稳定、灵活和可迁移的操作。
在多智能体与智能控制方向,中心围绕多智能体系统、算法博弈论、机制设计、分布式优化与复杂系统控制形成扎实基础,为无人机集群、空地协同、智能交通和协作机器人提供理论与算法支撑。
在新型机器人与声驱动技术方向,中心推动微纳机器人、超声机器人、声镊、超声原位制造、医疗机器人和仿生机器人等方向发展,拓展机器人在生物医学、制造和特殊环境中的应用边界。
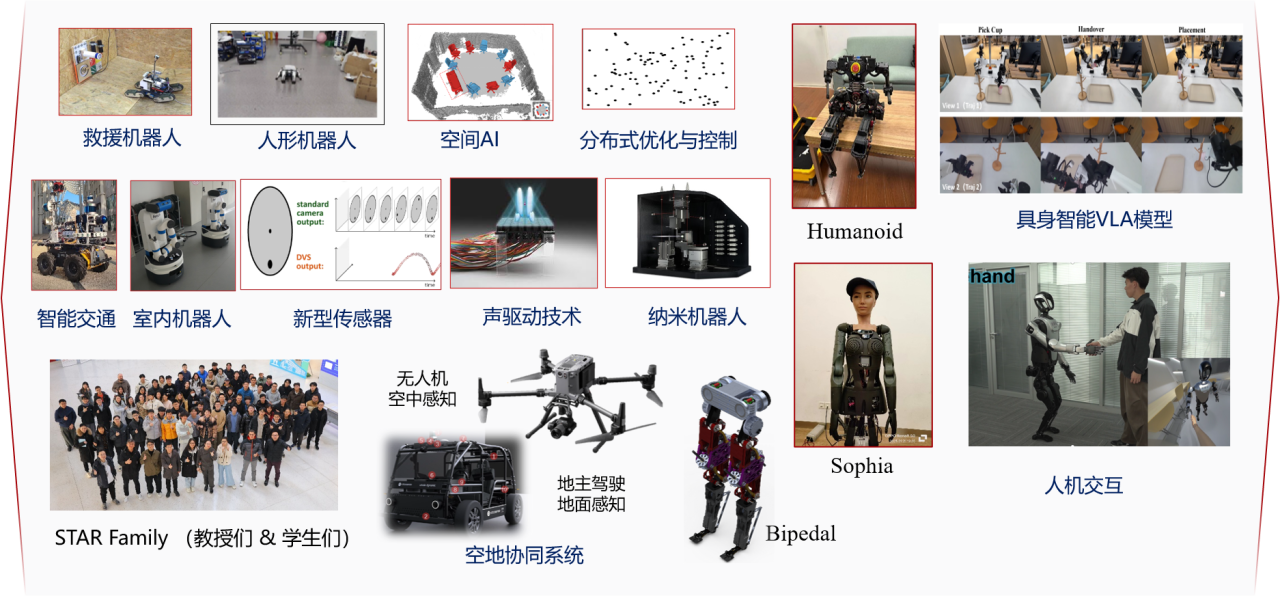
图:STAR 科研成果与应用场景概览
面向国际前沿的持续突破
STAR 相关团队在机器人、计算机视觉、多智能体系统和控制等领域获得多项国际学术荣誉,包括 ICCV 马尔奖相关荣誉、AAMAS 最佳论文奖、ICVS 最佳学生论文奖,以及 ICRA、RCAR、CoRL 等会议的最佳论文、最佳系统论文或 finalist 荣誉。
这些成果体现了中心在基础理论、感知算法、机器人系统与真实场景验证等层面的综合研究能力。与此同时,多个课题组持续承担国际会议组织、期刊编委和学术共同体服务工作,进一步增强中心的国际学术影响力。

图:STAR 中心所获科研奖项
# 04 #
教师团队:覆盖机器人全链条的多元力量

STAR 教师团队覆盖三维视觉与 SLAM、多智能体系统、分布式优化与控制、具身智能、机器人导航、事件视觉、空间智能、医疗机器人、微纳机器人、仿生机器人、机器人操作与人机交互等方向。不同课题组共同构成从基础理论、算法方法到机器人本体和系统应用的研究生态。













向下滑动查看更多
# 05 #
国际合作与学生培养:在真实机器人任务中成长

STAR 多个课题组与欧洲、北美、澳大利亚和亚洲的高校、科研机构及产业界保持合作联系,合作对象包括 ETH Zurich、Australian National University、Imperial College London、Carnegie Mellon University、UC Berkeley、KTH、University of Southampton、Ohio State University、Purdue University 等。
学生培养强调理论、算法、系统与实验并重。中心配备移动机器人、无人机、传感器、操作平台和实验场地,为学生提供从模型设计、代码实现到硬件集成和真实环境测试的完整训练。优秀学生可参与国际会议、学术交流、联合研究和产业合作,并在机器人、人工智能、自动驾驶和智能制造等方向继续深造或就业。
代表性培养路径:
● 围绕真实机器人问题开展长期科研训练,形成从问题定义到系统验证的完整能力。
● 参与国际会议、机器人竞赛、联合项目和海外交流,拓展学术视野与跨文化协作能力。
● 面向高校、科研机构和科技企业形成多元发展出口,兼顾学术深造与工程实践。

图:STAR Family(教授和学生们)
# 06 #
学生发展与毕业去向

从2023—2025届学生毕业情况看,STAR中心的人才培养呈现出“学术深造与产业就业并重”的多元发展格局。近三届毕业生共64人,其中71.9%进入企业及科研机构就业,25.0%继续深造,其他发展方向占3.1%。
就业去向覆盖华为、百度、支付宝、网易、海康威视、北京通用人工智能研究院、蔚来汽车等科技企业与科研机构,体现了中心学生在机器人、人工智能、自动驾驶、智能感知和工程研发等领域的综合竞争力;深造去向包括清华大学、复旦大学、哈尔滨工业大学、上海科技大学、加州大学圣迭戈分校、西北大学、慕尼黑工业大学和范德比尔特大学等国内外高校。多元去向反映出STAR中心以真实机器人任务为牵引,持续强化学生的理论基础、算法能力、系统实现与工程实践。
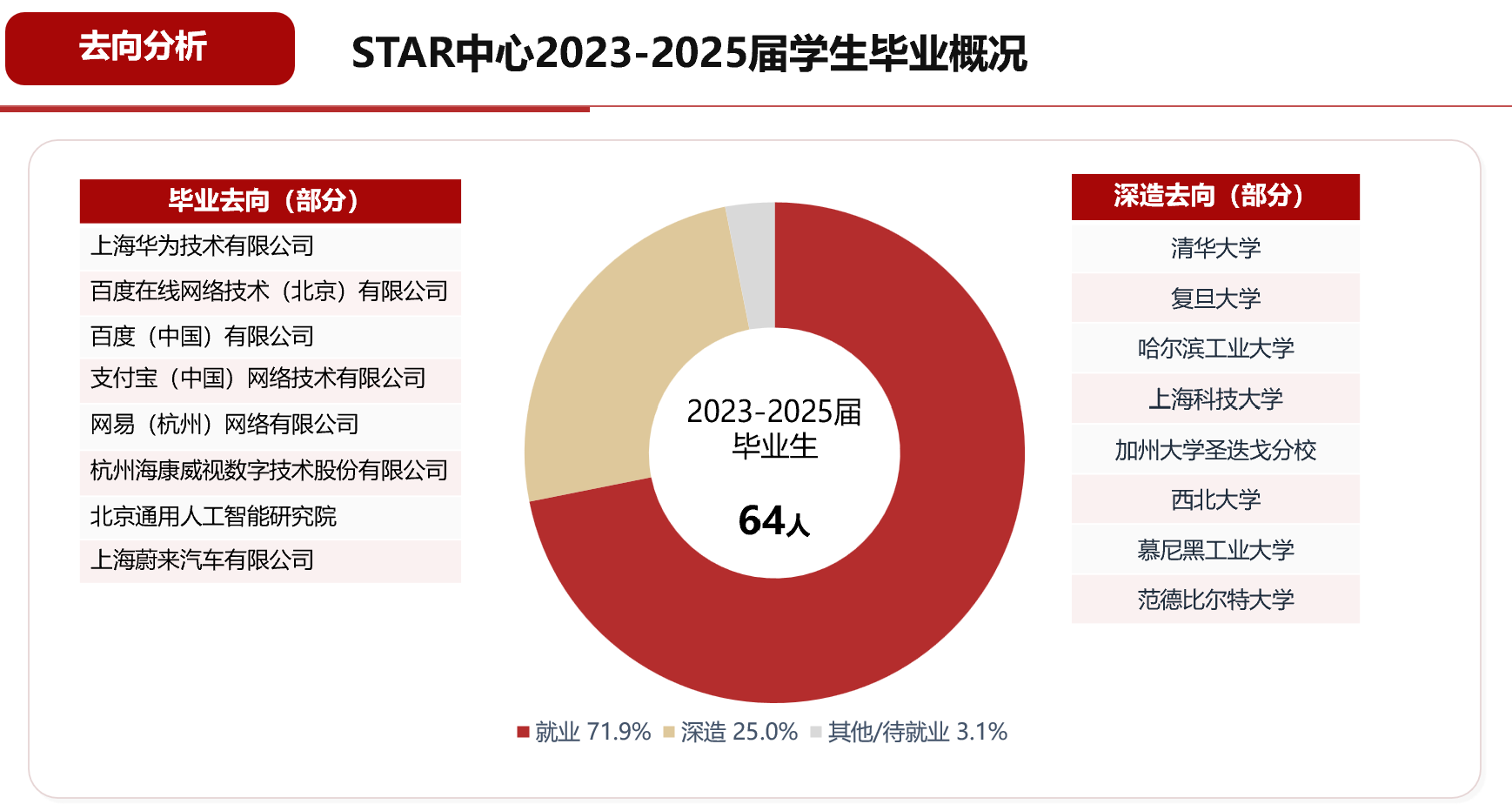
STAR 中心 2023-2025 届学生毕业概况
STAR中心优秀毕业生代表风采



# 07 #
结语:让智能系统感知、思考并行动

从空间感知与自主导航,到多智能体决策和智能控制;从具身大模型与灵巧操作,到医疗机器人、微纳机器人和仿生系统,STAR 正在构建一个面向真实世界的机器人与自动化研究平台。
中心的核心不仅是单一算法或单一机器人,更是让感知、学习、控制和交互形成闭环,使智能体能够在复杂环境中理解任务、作出决策、完成行动,并与人和其他智能体协同。
随着具身智能、多模态大模型、新型传感器和机器人本体不断发展,STAR 将继续面向学术前沿与现实需求,推动机器人从实验室走向更广阔的生产、生活与社会服务场景。

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


