
近日,2026年IEEE 国际机器人与自动化会议(ICRA 2026)在奥地利维也纳举行。上海科技大学信息科学与技术学院肖晨曦课题组的研究成果荣获大会最佳学生论文奖(Best Student Paper Award)。该奖项为ICRA面向学生主导的科研成果而设立,旨在表彰在机器人与自动化领域具有突出创新性和学术影响力的研究工作。

获奖合影
随着具身智能与灵巧操作技术的发展,触觉感知正成为机器人理解物理世界、完成复杂操作任务的关键基础能力。然而,现有机器人仿真环境对触觉的支持仍显不足,高保真触觉仿真通常计算成本较高,而简化的仿真方法又难以准确刻画传感器表面软体材料的接触变形过程,制约了机器人对触觉感知的利用。针对这一挑战,论文提出了 ETac触觉仿真框架。该框架在保持接近有限元分析精度的同时,显著提升仿真效率,并支持机器人触觉学习任务的大规模训练。实验结果表明,ETac 能够有效模拟真实触觉传感器的接触响应,为机器人触觉感知与具身智能研究提供了新的技术工具。
此次获奖是信息科学与技术学院继在CVPR、MICCAI、SIGGRAPH等国际高水平会议获得重要奖项后,取得的又一项国际奖项。近三年来,信息学院师生在国际重要学术会议上成果丰硕:2024年,获得CVPR最佳学生论文奖,AAMAS、MICCAI、IEEE VIS最佳论文奖,以及SIGGRAPH、DAC最佳论文奖及最佳论文提名等多项荣誉;2025年,再获SIGGRAPH最佳论文奖、最佳前沿技术奖、十佳技术论文快览,DAC最佳论文提名及ACM CHI 2025最佳论文奖。
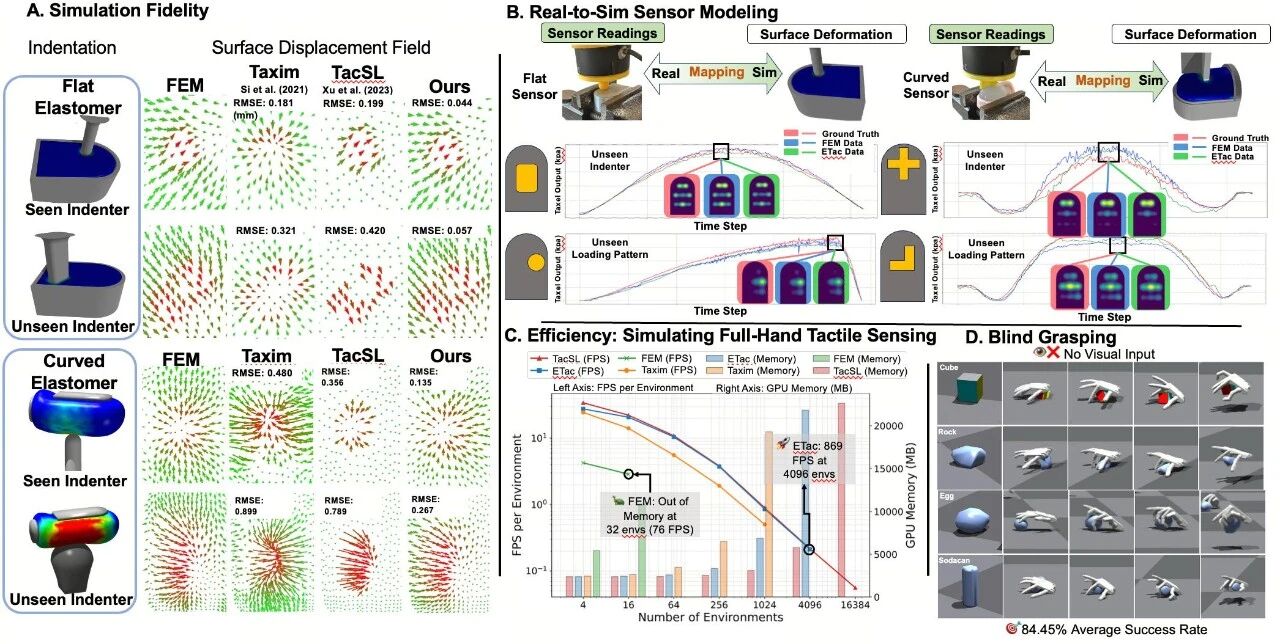
ETac触觉仿真框架。ETac能够以较高的保真度仿真传感器的输出信号,为触觉驱动灵巧操作技能训练提供高质量的数据支撑。
近年来,肖晨曦团队在智能感知与人机协同教育部重点实验室、上海市自然科学基金项目的支持下,持续开展机器人感知、灵巧操作、触觉智能与人机交互方向的研究。团队表示,未来将继续聚焦机器人触觉感知与具身智能领域,加强关键技术攻关和系统创新研究,推动相关成果向实际应用转化。此次获奖不仅体现了团队在机器人触觉感知与具身智能方向的长期积累和持续探索,也彰显了上海科技大学坚持科教融合、以学生成长为中心的人才培养优势。学校为学生开展高水平原创研究、参与国际学术交流营造良好环境,提供广阔平台。
此次获奖论文作者是2023级硕士研究生徐喆、2024级硕士研究生赵飞宇、2023级硕士研究生黄希雁,肖晨曦教授是论文的通讯作者。除ETac外,肖晨曦研究团队还在本届ICRA会议上展示了TriCoSphere灵巧机械手、NlipsTac触觉传感器等多项研究成果。
获奖论文题目:ETac: a Lightweight and Efficient Tactile Simulation Framework for Learning Dexterous Manipulation
学生作者赵飞宇在ICRA现场进行论文汇报

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


