
新入职教授介绍 PROFILE

师玉娇
信息科学与技术学院
助理教授、研究员、博士生导师
╱ 个人简介 ╱
师玉娇,博士,上海科技大学信息科学与技术学院助理教授、研究员、博士生导师。分别于2014年和2017年在南京邮电大学取得本科和硕士学位,2023年于澳洲国立大学取得博士学位(导师:李宏东教授),现加入上海科技大学信息科学与技术学院自动化与机器人中心(STAR Center)。
师博士的研究方向包括移动机器人定位和环境感知,场景理解和新视角生成,人机交互等。博士期间以第一作者身份发表人工智能和计算机视觉顶级期刊TPAMI两篇,CCF-A类会议6篇。
╱ 写给学生的话 ╱
科研的道路是漫长而枯燥的,然而,你也会从中获得很多快乐,比如,当你科研火花可以落地的时候,你的第一篇论文被接收的时候,你已发表的论文被他人引用并作为参考的时候等等。随着时间和知识的积累,你的研究在不断深入,你会发现,原来你也能促进这个行业的发展,我们都在或多或少的为这个社会贡献一份自己的力量,人生好像也不枉此行。
科研是一个自我打碎和重建的过程,这个过程常常十分痛苦。同时,我们需要克服很多困难,任何一个想法的成功都会经历无数次的失败。当今的社会和科研都在飞速发展,科研人员面临的压力也在不断的加大。希望每一个在求学过程中的学子们,都不会让困难磨灭了梦想,都可以迎难而上,越挫越勇。
╱ 研究方向和研究内容简介 ╱
课题组的研究方向主要包括移动机器人的实时定位和环境感知、场景理解和新视角生成、人机交互等。欢迎感兴趣的同学加入,我们一起努力,为科研事业贡献一份自己的力量。
移动机器人的实时定位和环境感知
移动机器人现在已经渗入到了各行各业,如自助驾驶汽车,无人快递小车,无人机农作物打药,救灾机器人等。在各行各业的应用中,移动机器人的实时精准定位技术显得特别重要。现在的一些室外定位技术通常采用GPS, 然而获取高精度位置信息需要非常昂贵的GPS装置,这将使得机器人的造价升高。因而,我们希望采用计算机视觉的方式,用一个相机来替换昂贵的高精度GPS或辅助便宜的低精度GPS,从而实现机器人的实时定位。
基于视觉的定位技术目前有很多种,最为广泛的是基于高精度地图(HD map)的定位技术。然而,其构建和维护成本非常高。SLAM技术也被广泛的应用于移动机器人的定位。然而,该技术需要移动机器人事先在目标区域运行一遍,以形成闭环从而构建目标区域的三维地图,用作他在实际执行任务时的位置参考。两种定位技术都需要目标场景的三维表达,对存储设备要求高,难以执行全国或大陆范围内的定位技术。此外,他们都需要事先对目标区域进行建图。在实际应用中,如灾难救援,无法实现构建灾难现场的三维地图然后再进行营救。
相比较而言,卫星图的覆盖范围广(整个地球),且更新及时,获取便宜。随着科技的不断发展,目前卫星图的地面分辨率可达厘米级。因而,利用卫星图进行移动机器人实时定位有着广阔的应用前景。

图 1 基于卫星图的移动机器人实时定位
场景理解和新视角生成
当移动机器人执行任务时,确保对周围环境的全面理解尤为重要。在场景理解方面,包括了对场景的三维信息、空旷区域和障碍物的识别以及周围物体的位置和距离等方面的综合认知。这意味着机器人需要具备对周围环境进行深度感知和理解的能力,以便更好地规划路径、避开障碍物并实现自主移动。
此外,针对机器人在执行任务过程中可能遇到的新视角或未知场景,新视角生成也是一项关键研究。机器人有时需要探索并获取从不同角度观察场景的能力,以获取更全面、更准确的信息。因此,新视角生成的技术将帮助机器人在不同情景下获得更多信息,进而提高其对环境的理解和适应能力。这种能力对于各种应用场景,例如智能导航、环境监测和辅助任务执行等方面都具有重要意义。
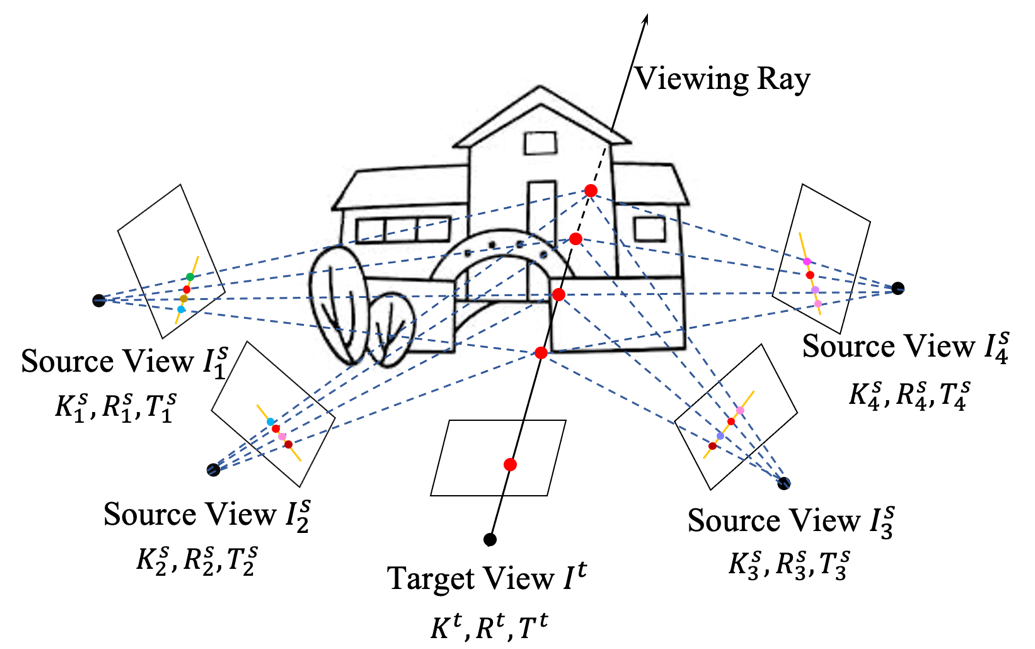
图 2 三维场景理解和新视角生成
人机交互
在特定情境下,移动机器人常需要与人类进行交流以完成任务。例如,当任务涉及使用电梯上下楼时,小型机器人可能无法触及电梯按钮,因此需要与周围的人交流并请求协助按动按钮。此外,机器人也可以通过观察控制人员的手势来识别指令并做出相应动作。这些情境中涉及到了行人和手势姿态检测分析等技术。
图 3 人机交互
另外,当机器手需要独立抓取物体时,就需要检测物体相对于机器人的六自由度位姿。这意味着机器人必须准确识别目标物体的位置、朝向、以及姿态,以便有效地进行抓取操作。这种技术不仅需要精准的视觉感知,还需要机器人在复杂环境中实时感知和定位目标物体。
因此,移动机器人的任务涉及了与人类的互动与协作,需要借助先进的人机交互技术和高精度的视觉感知能力。对于电梯按钮的交互需求,除了请求协助外,机器人可能需要具备自主决策能力,选择适当的时机与人类进行有效的沟通。而在抓取物体的任务中,则需要机器人具备高度精准的目标识别和位姿感知能力,以实现对物体的准确抓取。这些技术和能力的不断提升,将为移动机器人在现实生活中更广泛的应用提供重要支持。
╱ 对课题组学生的
寄语和期待 ╱
每个学生都是独一无二的。我希望大家可以找准自己的目标,并为之不断奋斗。相信每个学生都能成长为远见的鹰,善战的狼,敏捷的豹,镇山的虎!
兴趣、爱好
作为科研的调味品,闲暇时喜欢去健身房和户外运动。跑步,瑜伽,爬山,滑雪等都喜欢一些,但都不精。欢迎和大家一起组队健身啊~




 沪公网安备 31011502006855号
沪公网安备 31011502006855号


