
信息学院自动化与机器人中心(STAR Center)专注于机器人与自动化领域的持续创新,中心近期在机器人领域知名国际会议2023 IEEE International Conference Robotics and Automation (ICRA 2023)上发表了多项科研成果。
先进微纳控制技术
非接触式粒子操控(NPM)因其非侵入性的优点,比传统的粒子操控具有更大的应用潜力,大大扩展了机器人在生物医学工程、材料科学等领域的操控能力。中心的刘松课题组基于机器人方法在水平面成功操控了微米粒子,实现了自动捕获、闭环定位和实时运动规划,重复定位的精度高达像素级别,可应用于平行3D打印、微装配等场景。成果以“Noncontact Particle Manipulation on Water Surface with Ultrasonic Phased Array System and Microscopic Vision”为题发表,信息学院2019级本科生张叶歆和2021级研究生李家齐为共同第一作者,信息学院2022级博士研究生贾羽宇、信息学院助理研究员李腾老师参与了此项目,中国科学院自动化研究所苏虎教授和上科大信息学院刘松教授为通讯作者。
视频链接: https://www.amnrlab.org/research/
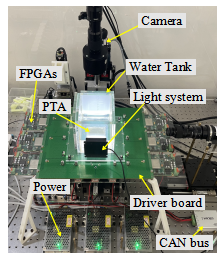
图 | 声学非接触式粒子操控平台
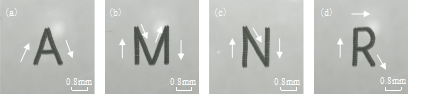
图 | 直径480μm的PS小球沿着‘A’, ‘M’, ‘N’, ‘R’四个字母运动的叠加轨迹
仅相位声全息术是针对非接触式机器人操作的一项基础且有前途的技术。与现有的面临着计算耗时和可能不收敛的问题的优化求解方法不同,研究人员提出了一种基于迭代无监督学习的实时仅相位声全息算法,可避免昂贵的获取标注数据集的工作。成果以“Real-time Acoustic Holography with Iterative Unsupervised Learning for Acoustic Robotic Manipulation”为题发表,信息学院2021级研究生钟承希为第一作者,信息学院2020级研究生孙震寰和信息学院助理研究员李腾老师参与了该项目,中国科学院自动化研究所苏虎教授和上科大信息学院刘松教授为通讯作者。
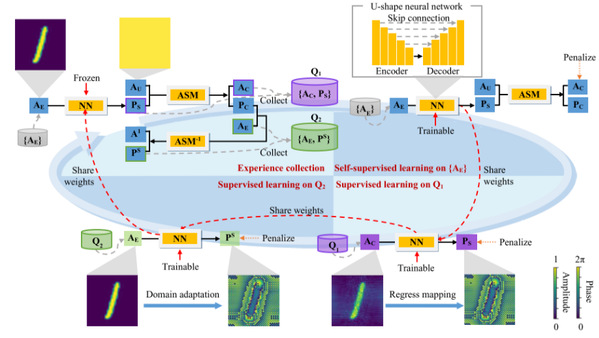
图| 迭代无监督学习算法的图示。它由四个阶段组成,即经验池收集、{AE} 上的自监督学习、分别在两个经验池上的监督学习。这四个阶段迭代进行以优化网络并逐步消除域偏差,直到产生可接受的期望目标振幅全息面的重建效果。
先进运动控制技术
在自然界中,动物物种可以跨越多代,对环境表现出生理性和结构性的适应性变化。而在机器人领域,传统意义上真实的机器人在其使用周期内会保持着一个不变的形态。为了解决这个问题,中心的Laurent Kneip教授联合上海交通大学与伦敦大学学院的研究人员提出了一种基于学习的控制方法。基于通用的控制器,机器人可以在其被使用的过程中更新其形态,以更好地适应从未见过的复杂环境。成果以“Multi-embodiment Legged Robot Control as a Sequence Modeling Problem”为题发表,信息学院2020级研究生余琛为第一作者,Laurent Kneip教授为通讯作者。
原文链接:https://arxiv.org/abs/2212.09078

图 | 腿长即躯干长度可变的机器人

图 | (灰色的)四张地图和中间的平面图相匹配
受到人类行为的启发,中心的Sören Schwertfeger课题组提出了一种基于学习的地形测量机器人定位方法FloorplanNet,该方法通过语义信息实现了尺度测量机器人地图与可能不准确的建筑平面在尺度不均匀以及形状各异的情况下的匹配。此方法在真实的室内环境中也表现出高鲁棒性和有效性,并且优于现有的SOTA地图匹配算法。该方法和模拟器发布于:https://github.com/fengdelin/FloorplanNet.git,成果以“FloorplanNet: Learning Topometric Floorplan Matching for Robot Localization”为题发表。 信息学院2020级研究生冯德霖为论文第一作者,2018级研究生何振鹏、2016级博士毕业生侯佳维,、百度研究院张良俊老师参与了该科研项目,Sören Schwertfeger教授为通讯作者。
即时定位与建图(SLAM)是许多机器人系统的基本功能,SLAM系统的巨大参数空间迄今为止仍然有待探索。Sören Schwertfeger课题组提出了名为SLAM Hive 的 SLAM 算法自动化评测系统,利用 Docker 容器来执行和评估算法, 且支持使用许多不同的配置进行评测。成果以“The SLAM Hive Benchmarking Suite”为题发表,信息学院2020级硕士研究生杨圆圆为第一作者, 2022级研究生徐博文和2021级研究生李胤杰参与了该科研项目, Sören Schwertfeger教授为通讯作者。
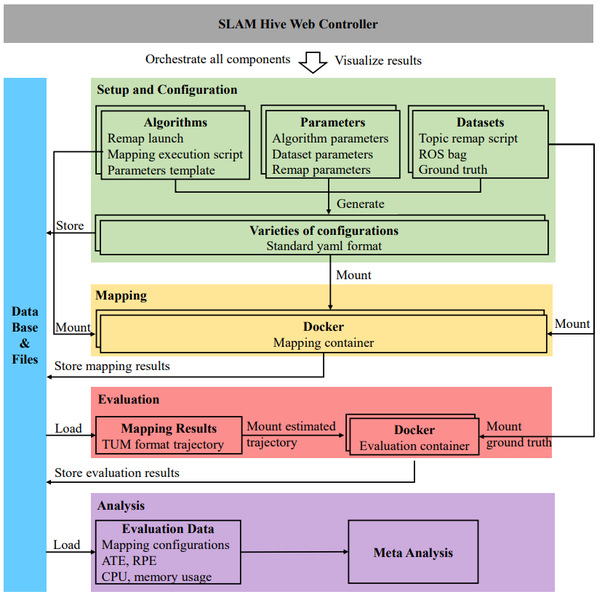
图 | SLAM Hive评测系统概要图

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


