
上科大信息学院自动化与机器人中心(STAR Center)专注于在自动化与机器人领域的持续科研创新,近期多项高水平研究成果先后发表在领域知名学术会议和期刊,包括IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)、IEEE Robotics and Automation Letters (RA-L)等。
先进感知技术
人类主要依靠眼睛来获得外界的各种信息,而对于机器人来说,则会使用不同的传感器来应对不同的任务和环境。通过传感器来获取外界信息是机器人与自动化技术技术最基础也是最重要的部分。
事件相机是一种新型的相机类型,它会在画面发生变化时返回数据。因其具有在高动态范围或挑战性光照条件下补充常规相机不足的强大潜力,事件相机在计算机视觉领域和移动机器人领域有广泛应用。研究人员设计了一套多传感器系统来录制有挑战性且有针对性的数据集,数据集囊括了在不同环境尺度下的多种运动模型,并涵盖了针对动态视觉传感器的特定挑战任务。相关成果以“VECtor: A Versatile Event-Centric Benchmark for Multi-Sensor SLAM”为题发表在RA-L上,并在IROS 2022会议上展示。信息学院2019级博士研究生高翎、MPL实验室外访生梁宇轩、信息学院2022级研究生杨家琪为论文的共同第一作者,Laurent Kneip教授为通讯作者。
原文链接:https://ieeexplore.ieee.org/abstract/document/9809788

图|多传感器系统.
RGBD相机即深度相机,与普通相机仅返回色彩信息相比,增加了一个深度信息。为从RGBD扫描图中恢复物体几何形状细节,研究人员提出了一种新的在大型数据库中细粒度检索CAD模型的解决方案。相关成果以题为“Accurate Instance-Level CAD Model Retrieval in a Large-Scale Database”被IROS录用。信息学院2020级研究生蔚嘉欣为第一作者,2022届博士毕业生胡兰和2022届本科毕业生王辰昱参与了科研项目。Laurent Kneip为通讯作者。
原文链接:https://arxiv.org/abs/2207.01339
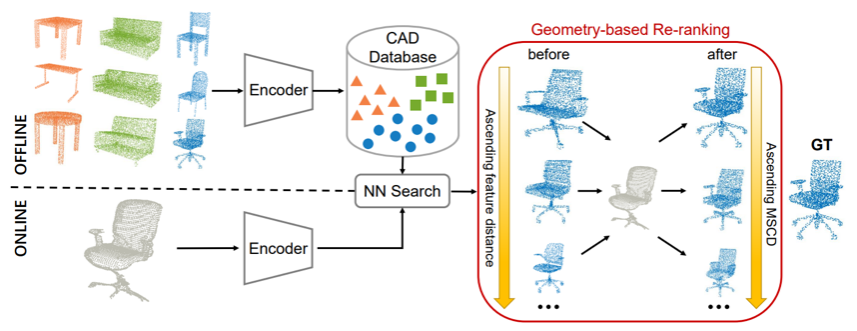
图|流程示意图
一般各种传感器都是固定在机器人上的某一位置,为了使用传感器返回的数据,我们需要了解传感器与相机的位置关系,特别是当一个机器人上有多个传感器时,还需要知道每对传感器之间的相对位置关系,而不同类型的传感器又为标定问题带来了更大困难。研究人员提出了一种通用的传感器的时空标定方法,命名为Multical。它利用多个标定板来估计传感器之间的相对姿态的初始值,使用户无需给定传感器姿态的初始猜测。实验结果证明了该方法的高准确性。相关成果以题为“Multical: Spatiotemporal Calibration for Multiple IMUs, Cameras and LiDARs”被IROS录用。2018届硕士毕业生智向阳、2017级博士生侯佳维为论文的共同第一作者,2021届本科毕业生陆奕人参与了科研项目, Laurent Kneip教授和Sören Schwertfeger教授为通讯作者。
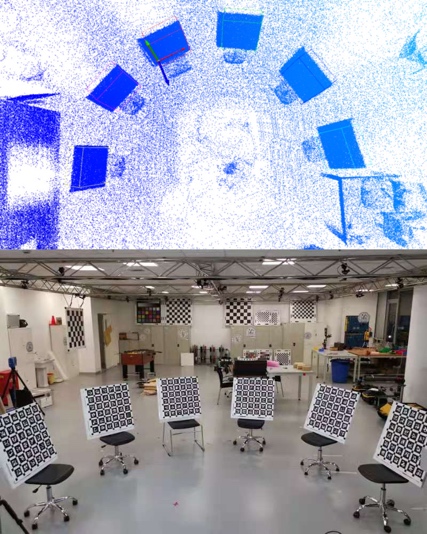
图|3D扫描以及雷达扫描到的点云展示
除了常见的视觉类传感器,还有着其他诸多类型的传感器,如触觉传感器,可用于获得各种视觉会被阻挡或者无法通过视觉获得的信息。研究人员提出了带有触觉传感器的软夹持器,通过将贝叶斯方法直接合并到CNN中所构成的分类器,来检测隐藏在软三维物体中的硬包裹体的大小和形状,新算法具有更高效、更高识别精度的效果。相关成果以题为“Variable Stiffness Object Recognition with Bayesian Convolutional Neural Network on a Soft Gripper”被IROS录用。2020级研究生曹今玥为论文第一作者,2019级研究生黄静怡参与了项目,Andre Rosendo教授为通讯作者。

图|实验设备
先进运动控制技术
指挥身体实现各种运动对于人类来说是很简单的事情,但对于形态各异的机器人来说却是一项困难的事情。如何有效地驱动机器人各种动作和越过障碍物也是机器人研究的一个重要部分。
利用轮子作为移动工具是最常见的机器人设计,但是轮子固定的形状会在很多场景下受到限制,比如在面对城市当中最常见的楼梯、台阶等障碍物时,便无法前进。研究人员提出了以OmniWheg命名的新式全向轮足可变形机器人。这种新的机械结构可以让机器人在全向轮和腿足两者之间进行切换,使得机器人拥有了在任何方向上都可以有效地进行移动的能力。相关成果以题为“OmniWheg: An Omnidirectional Wheel-Leg Transformable Robot”被IROS录用。2022届本科毕业生曹瑞翔为论文第一作者, 2021级研究生辜俊和2020级研究生余琛参与了项目,Andre Rosendo教授为通讯作者。
文章链接:https://arxiv.org/abs/2203.02118v1

图|OmniWheg 机器人 (a) 整机 (b) 全向轮模式 (c) 腿足模式
常见的足式机器人分为双足与四足类,双足机器人更加灵活快速,而四足机器人更加稳定,可以应付更复杂的环境,两类机器人各有利弊。而能够同时拥有两者优势的机器人将会对运动控制方向有着很大的帮助。研究人员提出了一个多模态的运动框架,通过设计特殊的支撑结构并利用新型的强化学习算法控制,使得足式机器人可以在四足模式和双足模式之间进行切换。他们让四足机器狗站立起来并将两条腿作为手臂的方式,将四足机器人的稳定性和双足机器人更高水平的灵活性结合在一起。相关成果以题为“Multi-Modal Legged Locomotion Framework with Automated Residual Reinforcement Learning”被IROS录用。2020级研究生余琛为论文第一作者,Andre Rosendo教授为通讯作者。
原文链接:https://arxiv.org/abs/2202.12033
实验视频:https://chenaah.github.io/multimodal/

除了台阶这类相较于机器人更矮的障碍物,有时也会遇到需要攀登比机器人自身还要高的障碍物的情况,尤其是灾难搜救机器人。通常我们所要应对的环境都不是理想的,因此解决这类问题便有了更大的意义。研究人员使用同款机器人,提出了一种基于学习的带约束的贝叶斯优化算法,CoCoBo。该方法利用高斯过程来训练机器人学会爬上比自己更高的障碍物。相关成果以题为“Learning to Climb: Constrained Contextual Bayesian Optimization on a Multi-Modal Legged Robot”被RA-L录用。2020级研究生余琛为论文第一作者, 2020级研究生曹今玥参与了项目,Andre Rosendo教授为通讯作者。
原文链接:https://ieeexplore.ieee.org/document/9835039
实验视频https://chenaah.github.io/coco/

图|正在爬上障碍物的机器人
先进微纳控制技术
非接触式机器人微纳操作是一种新型的机器人精密操作方式,与传统夹持器进行接触式精密操作相比,它将可操作目标尺度延伸到微纳米级别,使生物大分子、亚细胞结构操作成为可能。研究人员使用了相控换能器阵列 (PTA)支持的动态全息声场重建,和基于物理的深度学习 (PBDL) 框架,可实现非接触式机器人操作。相关成果以题为“Real-time Acoustic Holography with Physics-based Deep Learning for Acoustic Robot Manipulation”被IROS 2022录用。 2021级研究生钟承希为论文第一作者,2022级研究生孙震寰、高级工程师吕坤勇、上海交通大学郭遥老师参与了科研项目,刘松教授为通讯作者。
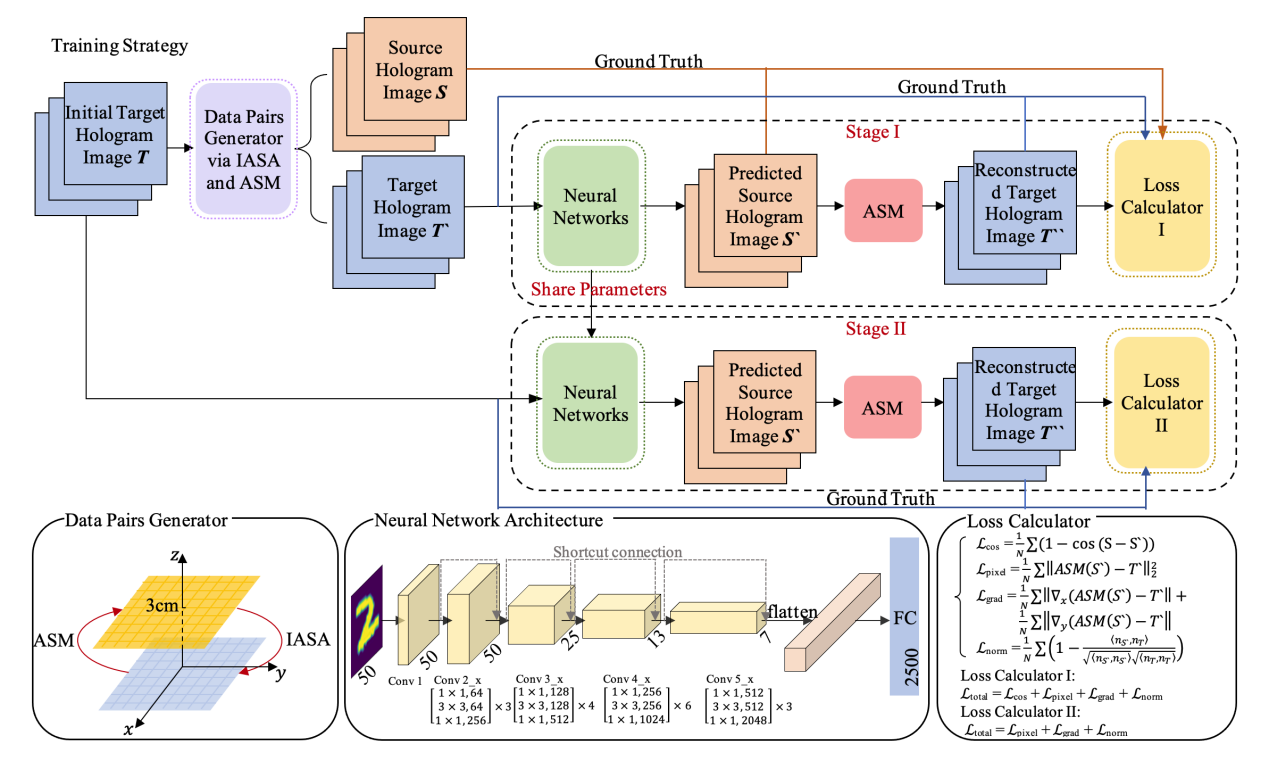
图|基于声全息术和物理的深度学习

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


