
无论是“钢铁侠”、“变形金刚”,还是“铠甲勇士”,他们的每一次出现,都能点燃大家对机器人的美好热情。随着人们进入智能时代,机器人在我们的生活中也随处可见。通常,我们常见的机器人可粗略分为工业机器人,服务机器人和科研机器人等。他们有的在工厂里重复着简单枯燥的机械操作(图1-a),有的在商场里亲切地和顾客打着招呼(图1-b),有的在家里兢兢业业打扫着地面(图1-c)。
|
|
图1-a 工厂常用机械操作机器人 | 图1-b商场导购机器人 |
|
|
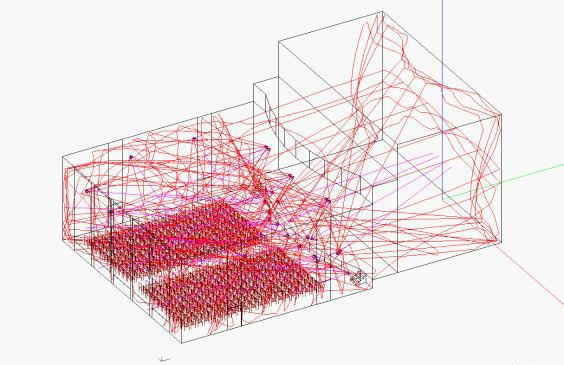
图1-c 家用扫地机器人 | 图1-d实验室建图机器人 |




根据不同的分类习惯,机器人的类型通常如表1所示,生活中我们常见的自然是家用,服务机器人。在学院的自动化与机器人中心,你还可以见到有趣的建图机器人(图1-d),机械臂和各种无人机。不过,见多识广的你,是否了解“微纳机器人”呢?
表1 机器人类型
类型 | 依外型 | 类人型,人型,六足,关节(机械手臂),BEAM,仿生,微型,纳米 |
依用途 | 家用,娱乐,军用,医疗,服务,残疾,假肢,农业,餐馆,工业,社交 | |
依使用环境 | 固定,地面,水下,太空,移动机器人,极地机器人 | |
依移动方式 | 脚,轮子,履带,飞 | |
依运动方式 | 跑步,游泳,旋翼,攀登,跳跃,爬行形类,摆 | |
部件 | 动力源,驱动,感应 | |
导航 | 手动遥控、遥控操作或远控自主,避障遥控,线控机器人,自主随机机器人,自动引导机器人,滑动自主 | |
(来源:纳米机器人学)
什么是微纳机器人?
微纳机器人:一种可以执行纳米尺度任务的机器人,具体来说其在纳米尺度具有如下一种或多种功能:驱动、传感、抓取、信号传递和信息处理等。除此之外,在未来其还应具有群体智能、自我装配与复制、纳米世界与宏观世界交互的能力。
不同于传统的大家伙,微纳机器人致力于解决“微小”的大事情!微纳机器人,并不要求机器人本身就是微纳米级别的,而是,从一个更广泛的定义来说,是机器人的运动及检测精度可以达到微米和纳米级别。正因如此,这类机器人能在微纳尺度上执行任务并且具有一定的灵活性、适应性,在新型材料制造、生命医学等领域有着举足轻重的地位。
为了进一步地认识微纳机器人的工作方式和特点,我们联系了信息学院自动化与机器人中心的先进微纳机器人实验室(AMNR Lab)的刘松老师,了解了实验室的两种微纳机器人。
AMNR Lab以微纳机器人为研究核心,研究内容既包括基于时下最先进的纳米机械手进行传统微纳机器人研究,也包括新兴的基于新型驱动方式的微纳机器人技术研究。
接下来就让我们一起看看AMNR Lab主导研发的两种微纳机器人吧~
声驱动机器人(acoustic robot)声学全息———声镊
类比于全息光场,在空间中设置多个声源,发出的声波相互作用影响,就会构成了一个声场。根据干涉原理,控制各个声源的相位、振幅、频率等,会间接改变声场中的能量分布,于是实现了对声场中目标的非接触的夹持操作,这也就是“声镊”名称的来源。显然,声源的控制精细度越高,就能够对更精小的物体实现更精巧的、更加精准的操作。
(图2全息声场图 来源:《3D打印声全息图系统问世 比现有声场精密100多倍》)
声镊相比于同样是非接触式的基于光全息技术的“光镊”,除了不会因为直接接触刺激操作对象,声学操作还具有可以通过非透明介质,无加热效应的优势。
目前,实验室搭建了对现有主流的声学全息系统提高一个数量级的硬件平台,最新的算法研究成果已发表在IEEE Robotics and Automation Letters上,题为'AcousNet: A Deep Learning based Approach to Dynamic 3D Holographic Acoustic Field Generation from Phased Transducer Array',进一步提升了声镊的控制精度。

(图3 实验室正在搭建的全息声场)
纳米机械手
在材料科学领域,我们往往需要进行分子、原子尺度的操作,例如纳米线材料的转移、对分子的一维拉伸等。生活中常见的工具在此时往往不起作用,那么我们就需要一套运动精度、运动分辨率都能达到纳米级别的“工具”来帮忙。
近期,AMNR Lab 就正在搭建这样一台纳米机器人。执行机构包含两个九自由度的操作手。通常大家提到运动机构都是用电机,这只是常规尺寸上的电驱动,然而在微纳尺寸上很难做出这么高精度的电机,因此主要利用压电效应。压电陶瓷的性质是给它一个电压的时候会产生形变,并且电压和形变有着明确的对应关系,因此可以实现可靠精细的位移的控制。整个执行机构会集成到扫描电子显微镜(SEM)中,也就是观测机构。在SEM的观测下,操作手的操作状态就可以及时地反馈给操作员,从而及时准确地完成任务。
目前,实验室正在努力实现基于像素甚至是亚像素级别的检测,探索对控制算法的实质性、精度、稳定性、鲁棒性更高的检测方法,微中取微,将探索的尺度与精度再次向前拓展。
至此,大家对微纳机器人有更深的理解了吗?
事实上,微纳机器人这个理念是上个世纪就有人提出来的,但真正突破性的进展还是近十几年的事,其核心原因是当时无法生产达到需要精度的微纳机器人。而在最近十几年中,不管是对材料还是对生命科学的贡献,都产生了很多可喜可贺的成果。从本质意义上来讲,科技发展是用技术手段去替代人力的过程。随着物理和材料这些基础科学的发展,相信在未来我们也一定会制造出具有智能体的微纳尺寸的机器人。无论是材料科学对更小尺度的绝对操控,还是生命医学实现人造血液和人造药物,都不会成为一种遥不可及的梦想。
国际上,加拿大皇家科学院士孙钰,北京理工大学外聘教授福田敏男,在此领域都深耕多年。国内哈尔滨工业大学,深圳高研院,中科院自动化研究所(徐德教授团队)和香港中文大学等研究机构也比较突出。目前我们国家在这个领域来说属于前沿的,但是研究领域的领先不代表工业领域的领先,我们仍然在微纳机器人运动机构的制备上缺乏相关技术。
看到这里,不知正在阅读的你,是否有兴趣投身于此呢?为此,刘老师也为同学们提供了一些建议:
“从专业知识的角度去讲,要多去了解一些线性代数的理论知识。在我自己开设的《机器人学导论》课上讲到了机器人研究的一些基本问题,也涵盖了很多我自己的研究,另外编程的能力和图像处理的知识也是需要的。当然最关键的还是一种热爱吧,喜欢了才能后面在这个方面精进,精进了才能有所成就,这是当年我的导师告诉我的。”
在科学上的每一小步都是我们共同的一大步,微纳机器人,发现微纳级别下的别有洞天,我看好你!

 沪公网安备 31011502006855号
沪公网安备 31011502006855号



{kind=link}