
我院马月昕课题组在3D点云分割中取得重要进展。相关成果以“Input-output balanced framework for long-tailed lidar semantic segmentation”为题在CCF-B类会议多媒体IEEE国际会议及展览会(IEEE International Conference on Multimedia and Expo (ICME) 2021)上发表。
全面的场景理解对于自动驾驶至关重要,LiDAR语义分割对于整体感知起着不可或缺的作用,并吸引了广泛的研究。但是,大多数现有方法都将注意力集中在网络设计和数据结构化处理上,而忽略了现实数据集中数据分布不平衡的特点。针对3D点云处理中的一个核心问题,即类别不平衡分布(也称为长尾分布),马月昕课题组设计了一个新型的神经网络结构和数据增强的架构,可以作为一个即插即用的模型应用于激光雷达的语义分割任务,具体来说,该框架是一个输入-输出平衡的设置,分别从输入和输出的角度改善长尾分布问题。从输入角度,通过分析原始数据集中长尾(即出现频率较少的模型)样本的位置和密度分布,利用LiDAR扫描生成点云数据的原理和目前已有的模型,合成不同类别的样本并加入原本数据集,从而平衡了输入数据并改善了数据的多样性。在输出部分,提出了一个多模块的输出方式,根据不同样本的形状和样本量对其进行分组,不同类别输入不同的输出模块,从而减轻了特征学习过程中主要类别的样例对少样本样例的影响。
该模型在两个大型数据集(即SemanticKITTI和nuScenes)上进行了评估证明了其有效性和先进性。提出的新模块还可以即插即用,适用于各种网络模型和数据集,进一步提升原模型的表现力,有良好的泛化能力。
课题组大四本科生丛培珊为第一作者,马月昕教授为通讯作者,上海科技大学为第一完成单位。
【原文链接】
https://arxiv.org/abs/2103.14269
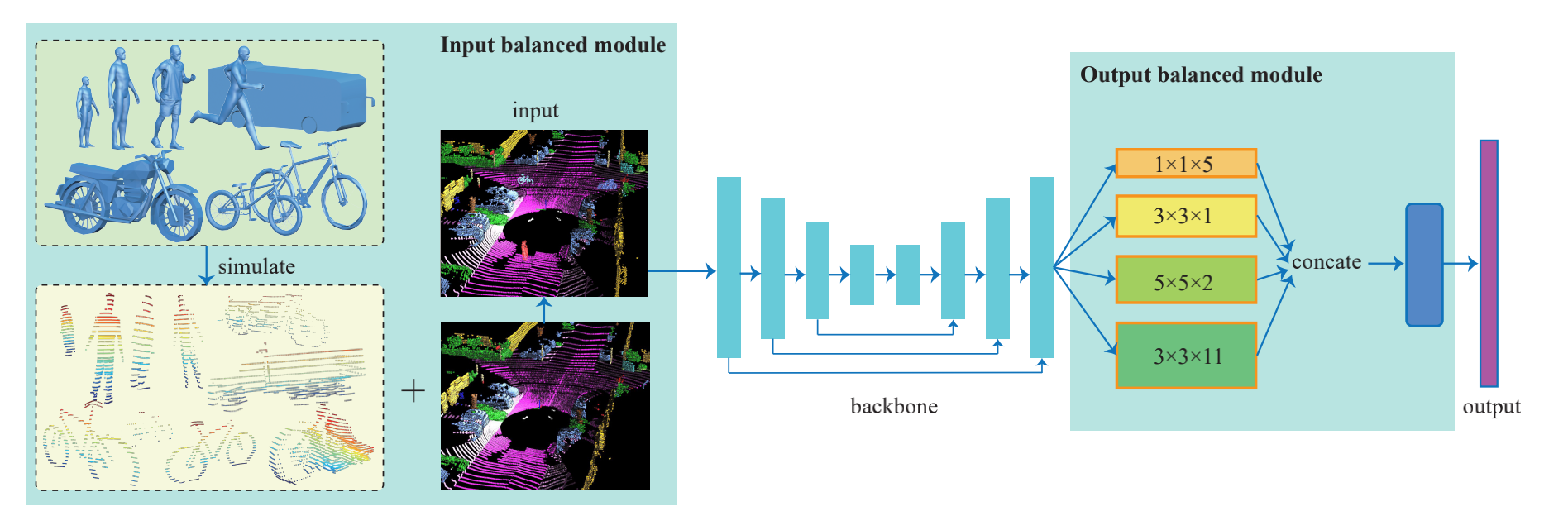
图一.方法框架
 表一.在SemanticKITTI数据集上的分割结果
表一.在SemanticKITTI数据集上的分割结果

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


