
我院自动化与机器人中心(STAR Center)Laurent Kneip教授课题组提出一种基于分支定界法的全局优化算法。该算法可应用于多个事件相机的运动估计问题并经实验验证,该算法比局部优化方法在准确度有大幅提升。该成果以“Globally-Optimal Event Camera Motion Estimation”为题在国际计算机视觉顶级会议2020 European Conference on Computer Vision (ECCV)上发表。ECCV是计算机视觉三大会议之一,每两年举办一次,论文接受率27%。
事件相机是一种新型动态视觉传感器,与传统相机相比,其具有低延迟(<1us)、高动态范围(140dB)、极低功耗(1mW)。然而,事件相机的工作机制与传统的基于帧的相机存在本质区别。事件相机对每个像素进行独立异步处理,当任意一个像素的亮度变化累计达到一定阈值后,输出一个事件。事件相机测量对数亮度的变化,并以时间戳事件的高度离散形式返回输出。处理这种特殊事件数据需要新的模型和算法。
针对基于事件相机的运动估计问题, Laurent Kneip教授课题组提供了一种全新的全局优化算法。事件的运动由时空体积中的一般单应转换来模拟,目标是最大化由转换的事件构成的图像的对比度。该算法的核心贡献在于推导出这些一般非凸问题的全局最优解,从而消除了现有局部优化方法对良好初始猜测的依赖性。该方法依赖于分支定界优化,并采用新颖高效的递归上下界来推导六种不同的对比度估计函数。通过对三种不同的事件相机运动估计问题的成功应用,证明了该方法的有效性。 该方法具有广泛的潜在应用场景(自动驾驶,VR,AR等)以及很高的理论研究价值。
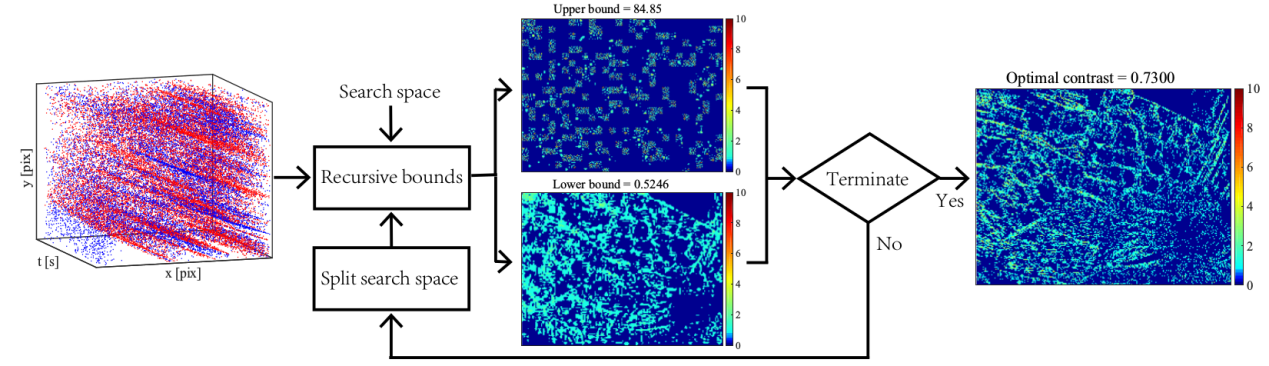
图1. 全局最优对比度最大化算法框架(GOCMF)示意图
上海科技大学信息学院是该研究的第一完成单位,2018级博士研究生彭欣为第一作者,Laurent Kneip教授为通讯作者。此外同组2019级硕士研究生高翎和来自澳大利亚国立大学的访问博士生王一夫共同参与完成此项工作。该工作得到了国家自然科学基金、上海自然科学基金的支持。
文章链接:https://link.springer.com/chapter/10.1007/978-3-030-58574-7_4

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


