
ShanghaiTech Automation and Robotics Center(STAR Center) of SIST under the direction of Professor Laurent Kneip recently proposed a novel, globally optimal algorithm that can be applied to a variety of motion estimation problems of event cameras and verified by experiments. The algorithm is based on the branch and bound optimization technique, and the accuracy of the algorithm is one order of magnitude higher than that of local optimization methods. With the title of 'globally optimal event camera motion estimation', the achievement was published in a top international computer vision conference, the 2020 European Conference on Computer Vision (ECCV).
Event cameras are novel bio-inspired sensors. They offer significant advantages with respect to conventional cameras, low layency(<1us), high dynamic range(140dB), and low energy consumption(1mW). Event cameras perform well in challenging illumination conditions and have high temporal resolution. However, their concept is fundamentally different from traditional frame-based cameras. They are so-called neuro-morphic sensors and work more like the human eye. The pixels of an event camera operate independently and asynchronously. They measure changes of the logarithmic brightness and return them in the highly discretized form of time-stamped. New models and algorithms are needed to process this kind of measurements.
In order to solve the motion estimation problem with event cameras, Prof. Laurent Kneip’s group proposed a novel, globally optimal algorithm. The flow of the events is modelled by a general homographic warping in a space-time volume, and the objective is formulated as a maximization of contrast within the image of warped events. The core contribution consists of deriving globally optimal solutions to these generally non-convex problems, which removes the dependency on a good initial guess plaguing existing methods. The practical validity of our approach is demonstrated by a successful application to three different event camera motion estimation problems. The proposed globally optimal solution to these problems provides important insights on the achievable accuracy of event-based contrast maximisation methods, and has a wide range of potential application scenarios(autonomous driving, VR/AR, etc.).
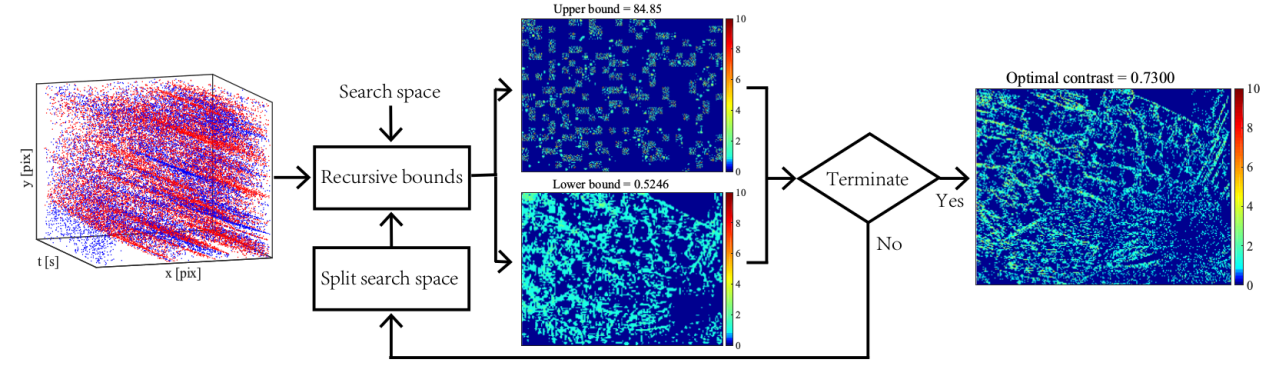
Fig.1 Globally-Optimal Contrast Maximisation Framework (GOCMF)
This work was conducted at The School of Information Science and Technology, Shanghai University. PhD student PengXin is the first author and Professor Laurent Kneip is the corresponding author. Meanwhile, this work is collaborated with Master student Gao Ling and PhD student WangYifu from Australian National University. This work was supported by the start-up funding from ShanghaiTech University, the National Natural Science Foundation of China, and Natural Science Foundation of Shanghai.
 沪公网安备 31011502006855号
沪公网安备 31011502006855号


