计算机与通信学科平台成功举办移动机器人暑期培训活动
发布者:闻天明发布时间:2025-07-24浏览次数:1022
为提升同学们在机器人操作系统、运动控制及定位与导航等方面的实践能力,信息学院计算机与通信学科平台于2025年7月6日-7月11日组织了移动机器人TurtleBot4培训。本次培训涵盖硬件原理、Gazebo仿真操作、ROS2 系统应用及自主导航算法实现等核心内容,助力学生为科研、竞赛或职业发展筑牢基础。
本次培训得到了智能网络中心与自动化与机器人中心的大力支持。智能网络中心主任邵子瑜教授向同学们讲述了具身智能的快速发展和机遇,勉励同学们通过此次培训掌握开展科学研究的基础技能。自动化与机器人中心主任Sören Schwertfeger教授向同学们讲授了移动机器人基础、机器人操作系统ROS2、自主导航、算法等基础理论知识。
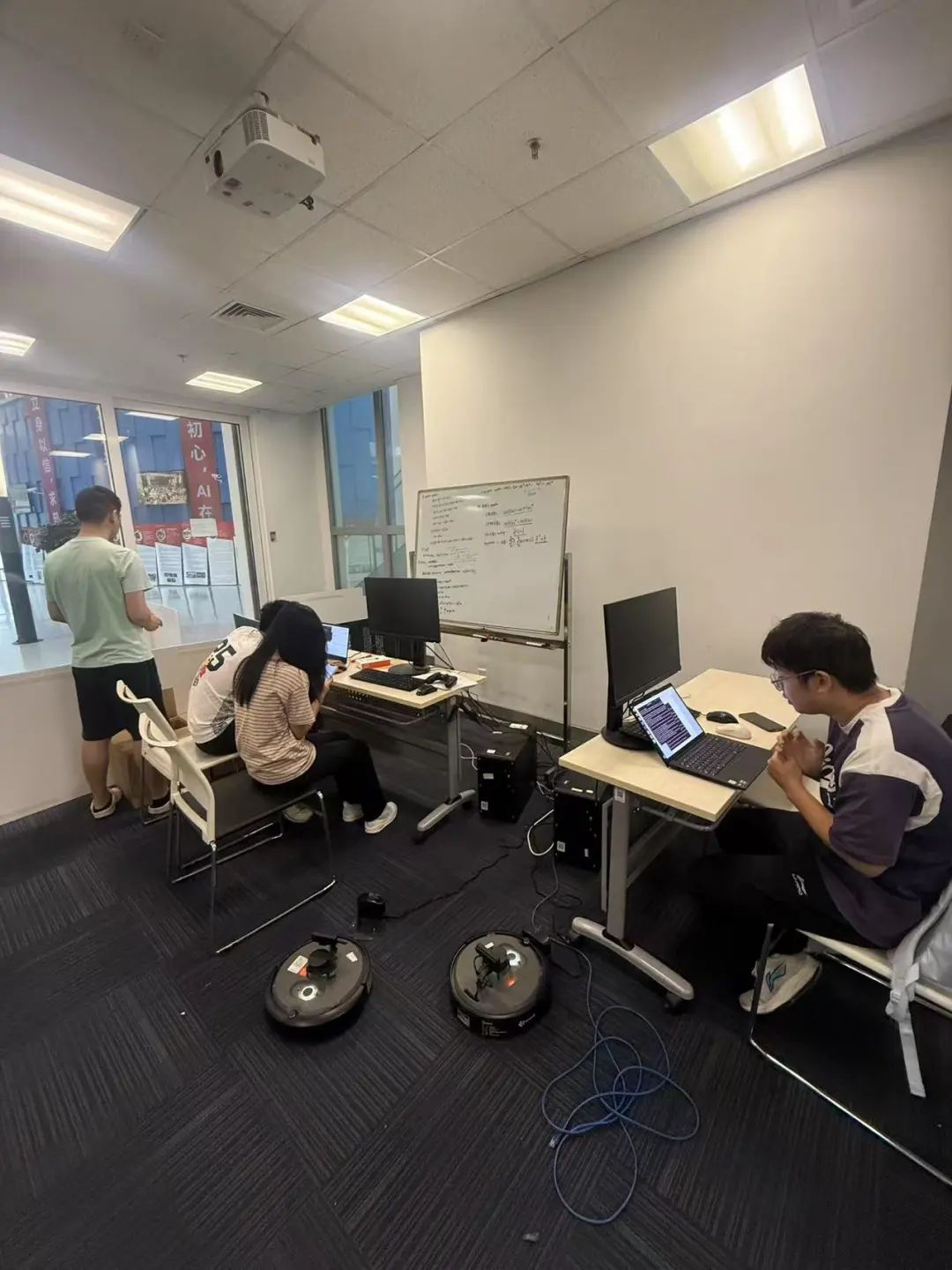
实操培训由计算机与通信学科平台工程师吕坤勇、王永丽,设备厂家工程师陈安琪,学生助教王跃众共同指导。实操培训分为Gazebo仿真和真机操作两个阶段,要求同学们实现机器人自主导航并探索新的全局路径规划算法。此次培训吸引了24位同学参加,3-4位同学组成一组,共分为7组进行。各小组相互讨论、协作,共同学习移动机器人理论知识和实操技能。
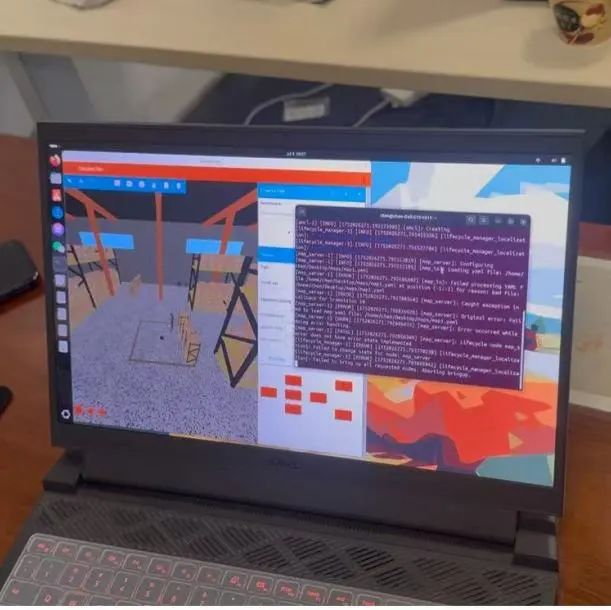
学生从安装电脑操作系统Ubuntu24.04开始学习,安装最新的机器人操作系统ROS2 Jazzy,机器人仿真环境Gazebo Harmonic,配置软件环境,分组协作。按照实验指导手册,一步一步实现机器人仿真操作。
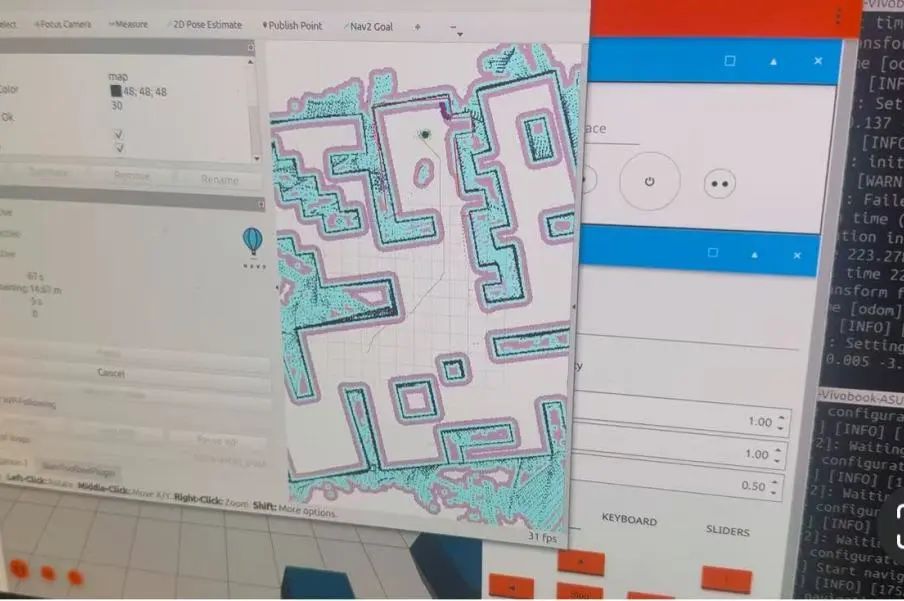
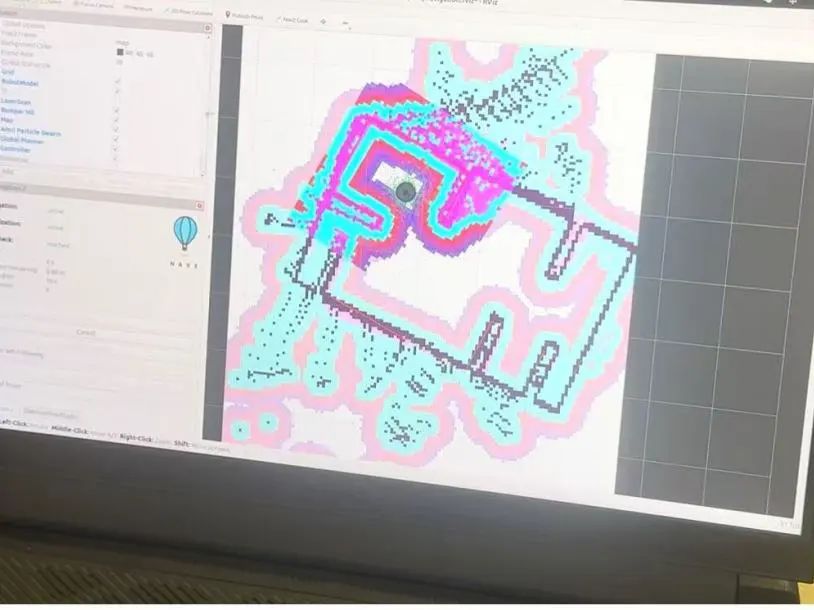
每个小组都能够独立实现地图构建与导航、自定义地图与障碍物、鼓励学生自定义路径规划器,实现Gazebo仿真环境下自主导航。
实战演练部分从主机连接真机环境配置,到移动机器人小车各个组件工作原理,学生全程参与,完成组装、编程、故障排查,以及全局路径规划算法实战,鼓励学生自定义路径规划器和自主导航算法编写。每个小组独立协同作业,遇到问题现场有工程师和助教团队及时解决,协助每组学生完成中期汇报以及成果展示。
同学们对理论结合实操的移动机器人培训活动展现了很大的热情,主动与工程师和助教探讨沟通,有部分同学表示此次培训结束后还要继续做一些移动机器人的项目或竞赛。经过连续6天的培训,各组均实现了仿真操作和实物操作,有的小组还对参数调解和导航算法进行了深入研究。通过此次培训,同学们了解了移动机器人的基本原理、练习了机器人操作系统ROS2、实现了移动机器人自主导航的仿真与真机实操。
上海科技大学信息学院计算机与通信学科平台立足服务人工智能重点领域发展战略,从提升学生科研和创新能力需求出发,为培养计算机与通信技术人才贡献力量。












 沪公网安备 31011502006855号
沪公网安备 31011502006855号
