
新入职教授介绍PROFILE

·个人简介·
肖晨曦,博士,现任上海科技大学信息科学与技术学院助理教授、研究员、博士生导师。他于2013年毕业于西北工业大学,获得电气工程与自动化专业的学士学位。随后,他在2016年取得了西北工业大学电力电子与电力传动专业的硕士学位。同年,他加入了中国电子科技集团公司第五十四研究所,从事卫星指向跟踪天线系统的研发工作。在2018年,他加入香港理工大学从事机器人强化学习与控制方向的研究。在2019年,他前往普渡大学攻读博士,师从Juan Wachs教授,并于2023年获得博士学位。
肖博士的研究兴趣涵盖了机器人触觉、物体操作、遥操作机器人以及运动规划等领域。他的主要科研成果已经发表在IEEE Transactions on Robotics、IEEE Robotics and Automation Letters等机器人和人工智能领域的重要学术期刊上。
1
写给学生的话
科研的起点包括灵感和大胆的质疑。在科研的道路上,我们常常会查阅大量的文献和资料。尽管广泛阅读文献非常重要,但“尽信书不如无书”的谚语提醒我们,接受其他学者的观点或理论时,不应盲目追随旧观点,而应深入思考更深层次的科学原因。在这个过程中,创新性思考往往源于对问题的充分理解,以及寻找是否存在尚未解决的难题。
科研之路充满了挑战和不确定性,但正是这些挑战使我们不断成长进步。日积月累的学习、将思考进行迭代、充分尝试和实践是产生创新成果的关键步骤。因此,我常常自勉要在失败和挫折中学习,为新的发现贡献自己的一份力量。
2
研究方向和研究内容
机器人与其他人工智能研究方向的一个主要区别在于其能够与物理世界进行交互。这种交互能力已经为社会生产和日常生活带来了巨大的便利。从技术上讲,这些交互任务也为我们的科研工作开辟了新的方向。然而,实现机器人与环境的复杂交互也带来了前所未有的挑战。机器人与物体交互的问题是十分重要且困难的研究课题。
在与真实物体的互动中,我们面临着巨大的不确定性。首先,在触碰物体前,物体的特性难以被提前预知。此外,在触摸物体的过程中,其接触动力学模型也难以被精确描述。除此之外,我们还必须应对来自真实世界的各种复杂问题,包括传感器噪声和来自环境变化的扰动。因此,我博士期间的研究主要聚焦于利用机器人主动探知物体的信息,从而改善机器人与物体交互任务的性能。具体来说,我目前的研究工作主要包括以下三个方向:
1
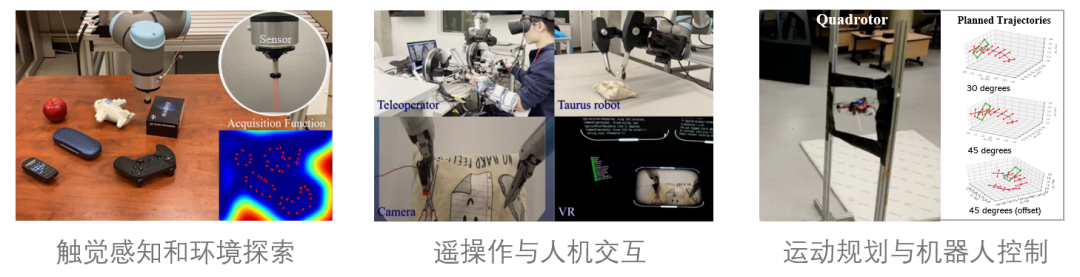
机器人的自主触觉感知问题
在机器人系统中,计算机视觉通常用于环境感知和智能决策,但触觉信息在机器人与环境交互中也扮演着重要角色。与人类一样,机器人需要通过触觉来感知力度、温度、材质等信息,并根据这些反馈来调整和物体交互的动作。然而,目前机器人的触觉系统仍然存在一定的不足,其硬件性能和智能决策水平与人类相比存在着很大的差距。因此,我的研究方向着重于机器人的触觉传感器硬件以及触觉智能感知算法的设计。首先,我致力于开发能够在机器人与物体交互过程中获取多种物体信息的多模态、高灵敏度触觉传感器。在这些传感器触碰物体时,通过结合信号分析和深度学习等方法, 我们可以推断物体硬度、材质、温度和形状等信息。进一步,我还在研究自主的触觉探索策略,使机器人能够主动触摸物体,并收集物体的必要信息。这套系统使得在视觉信息缺失的情况下(例如浑浊的水下环境、或物体被遮挡),让机器人自主完成任务成为了可能。
2
遥操作机器人的人机交互问题
触觉信息在远程操作机器人中扮演着重要角色。触觉信息在操作员和机器人间的实时传递对于提高交互的安全性(避免损伤物体和机器人)非常重要。这一点尤其适用于手术机器人和排爆机器人等需要操作精密物体的系统。然而,目前主流的遥操作机器人尚未充分融合触觉反馈模式(比如达芬奇手术机器人)。因此,我的研究方向着重于可适用在远程操作机器人的触觉传感器的开发,以及将触觉信息实时传递给操纵人员的方法。通过实时传递接触力、物体材质等多模态信息给操纵人员,我们希望让操作员在操控远程物体时感觉就像身临其境一样。这不仅提高了操作的安全性,还可帮助操作员更好地理解物体的材质、硬度等特征。
3
运动规划问题
运动规划问题在机器人与环境互动中起着关键作用。在执行复杂动作的过程中,确定动作类型、顺序和时机对于成功完成任务十分重要。运动规划技术的目标是协助机器人生成可行的动作轨迹,以便安全、高效地完成任务。我借助了优化和强化学习等方法,成功为机器人生成了触觉自主探索动作以及无人机在障碍穿越方面的动作。这些方法使得机器人能够更灵活地应对复杂环境,并且在与环境的互动中取得更好的表现。
3
对课题组学生的寄语/期待
课题组的研究横跨机器人和人工智能、电子、控制等多个领域。我们的目标是将机器人技术普及到千家万户,使它们成为人类生活中不可或缺的一部分。我们相信机器人可以在医疗、教育、娱乐和许多其他领域发挥巨大的作用。如果你与我们有着相同的愿景,或在机器人领域有独特的想法,或对机器人和科研有着强烈的热爱,我们非常欢迎你加入我们的课题组。我们将帮助你根据个人兴趣、专业技能和未来职业规划来制定研究课题,助你在上科大度过快乐、有意义且成功的几年。
兴趣 · 爱好
除了科研活动,我有着多样的兴趣和爱好。一方面,我喜欢宅在家里,享受和家人度过幸福的时光。在业余时间,我喜欢打游戏,在虚拟世界中观看精彩的故事和见证角色的成长。另一方面,我热衷于出行,欣赏大自然的壮丽风光。我经常骑行,享受在大自然中运动的愉悦。这些兴趣使我的生活更加丰富多彩,让我每天都能找到乐趣和满足感。
生活照




 沪公网安备 31011502006855号
沪公网安备 31011502006855号


