
近日,信息学院汪阳课题组硕士研究生赵炀炀,龚逸洲,徐江坤以第一作者身份在自动控制领域学术会议International Federation of Automatic Control (IFAC) 各发表学术论文一篇。相关研究提出了一些新颖的控制算法,可用于自动化生产流水线的减震,飞行器的抗噪,机械臂的高精度运动控制,硬盘驱动器的抗噪和无人机灵活编队,自主循迹,避障和探测问题等。
时变输出未知非线性系统的迭代学习控制
针对一类非线性不确定系统的轨迹跟踪问题,研究人员提出了一种新的自适应迭代学习控制(AILC)方法。该方法通过自适应控制方法,显著降低了不确定性和扰动的影响,同时利用势垒复合能量函数(BCEF)分析状态误差的收敛性和输出的有界性。该方法已经应用于一个具体无人机算例,并验证了其有效性,同时也通过生成真实湍流的高保真仿真平台验证了该算法的鲁棒性。该成果题为Iteration Learning Control for Uncertain Nonlinear Systems with Time Varying Output Constraint,信息学院21级硕士研究生赵炀炀和20级博士生张恒为文章共同第一作者,助理教授汪阳为通讯作者。
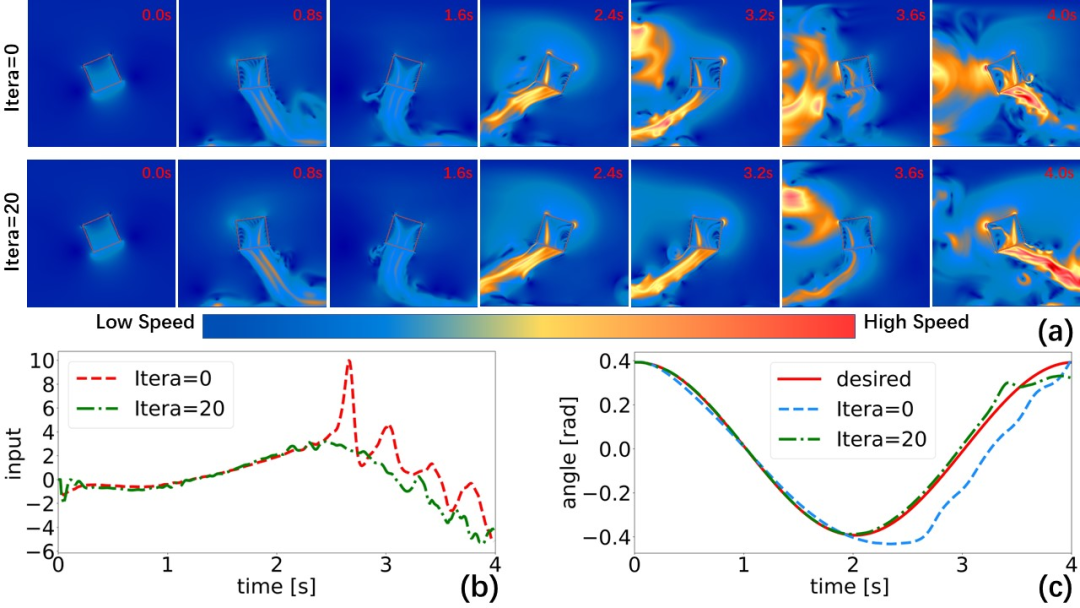
图(a)流体仿真示意图,(b)控制输入迭代次数图,(c)追踪角度迭代次数图
控制方向不确定下未知线性最小相位系统的鲁棒输出调节
针对最小相位不确定系统在鲁棒输出调节框架下的噪声抑制问题,研究人员提出了一种基于未知输入观测器(UIO)的新型控制器来抑制未知外界扰动,并为应对控制方向的不确定性设计了监督函数。该算法特点是可以直接估计并完全排除外界干扰,可适用于任意相对阶的系统。闭环系统的有界性对其渐近收敛性进行了严格的证明,并通过数值计算进行了有效验证。 该成果题为Robust Output Regulation for Uncertain Linear Minimum Phase Systems under Unknown Control Direction。信息学院22级硕士研究生龚逸洲为文章第一作者,助理教授汪阳为通讯作者。
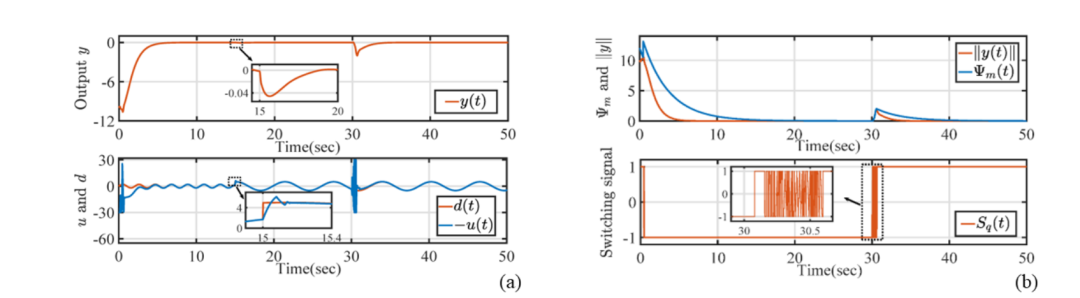
图(a)系统输入输出图,(b)监督函数及切换信号输出图
正弦干扰作用下不确定离散LTI系统的鲁棒输出调节
针对不确定单输入单输出离散线性系统的鲁棒输出的调节问题,研究人员提出了一种基于自适应前馈控制(AFC)的新策略,旨在抑制频率信息先验的正弦干扰。与现有的不确定离散时间系统控制器相比,该方法既不需要知道频幅响应符号(SPR条件),也不需要持续激励条件,只利用小增益定理和基于李雅普诺夫的稳定性理论,对闭环系统的稳定性进行严格的分析。所提出的方案保证了闭环系统的所有信号有界的,且系统的输出渐近收敛于零,并通过数值例子得到验证。该成果题为Robust Output Regulation for Uncertain Discrete-Time LTI Systems under the Effect of a Sinusoidal Disturbance。信息学院21级硕士研究生徐江坤为文章第一作者,助理教授汪阳为通讯作者。

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


