
2023年10月1日-2023年10月5日,为期5天的IEEE/RSJ International Conference on Intelligent Robots and Systems 2023( IROS 2023)在美国底特律的Huntington Place召开。IROS会议作为世界范围内机器人、AI以及自动化领域最具影响力的顶级国际学术会议,汇聚了全球顶尖高校、科研机构及创新企业的人才出席,以展示最前沿和炫酷的机器人产品及研究成果。 IROS 2023以“下一代机器人(The Next Generation of Robotics)”为主题,切合今年如ChatGPT等大语言模型带来的人机交互的潮流与突破。我很荣幸能前往底特律参加IROS 2023会议与世界顶尖科研人员进行学术交流,并于10月2日下午在视觉SLAM主题的演讲环节和海报展示环节展示我们所发表的文章“Optimizing the extended Fourier Mellin Transformation Algorithm”。

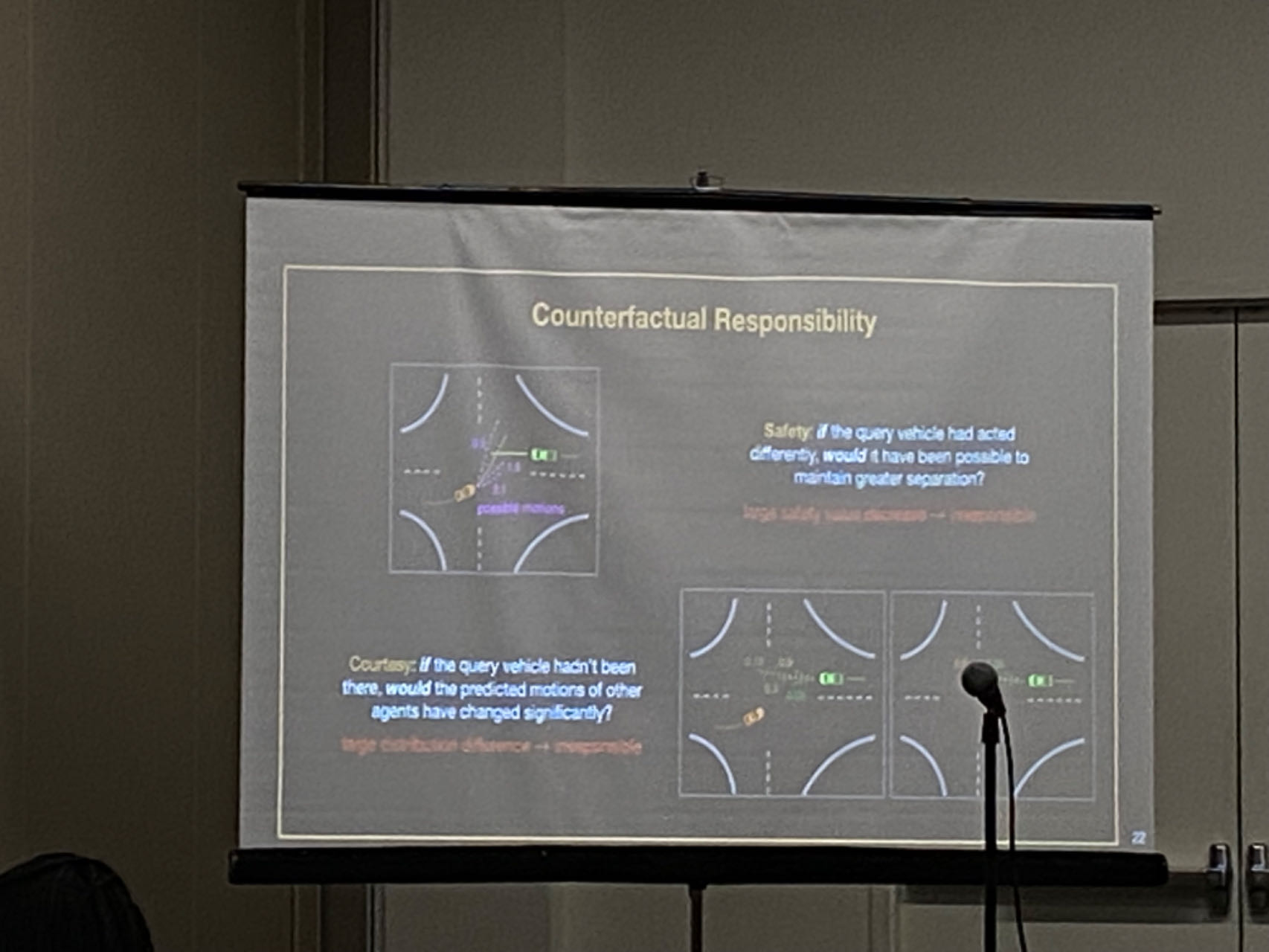
10月1日所展示的是IROS Workshop的工作,我挑选了感兴趣的主题听了相关的学术报告并且在海报展示区域与来自世界各地高校的研究者们进行了交流。我主要了解了一些机器人导航,智能交通以及SLAM的相关工作。同时,一些新兴公司将机器人技术在工业界的应用让我大开眼界。密歇根大学有一项关于数据集收集的工作让我印象深刻。他们不仅仅收集了多传感器的数据,还很好的做了可视化的工作,让多种不同类型的数据很直观的呈现在科研工作者面前。
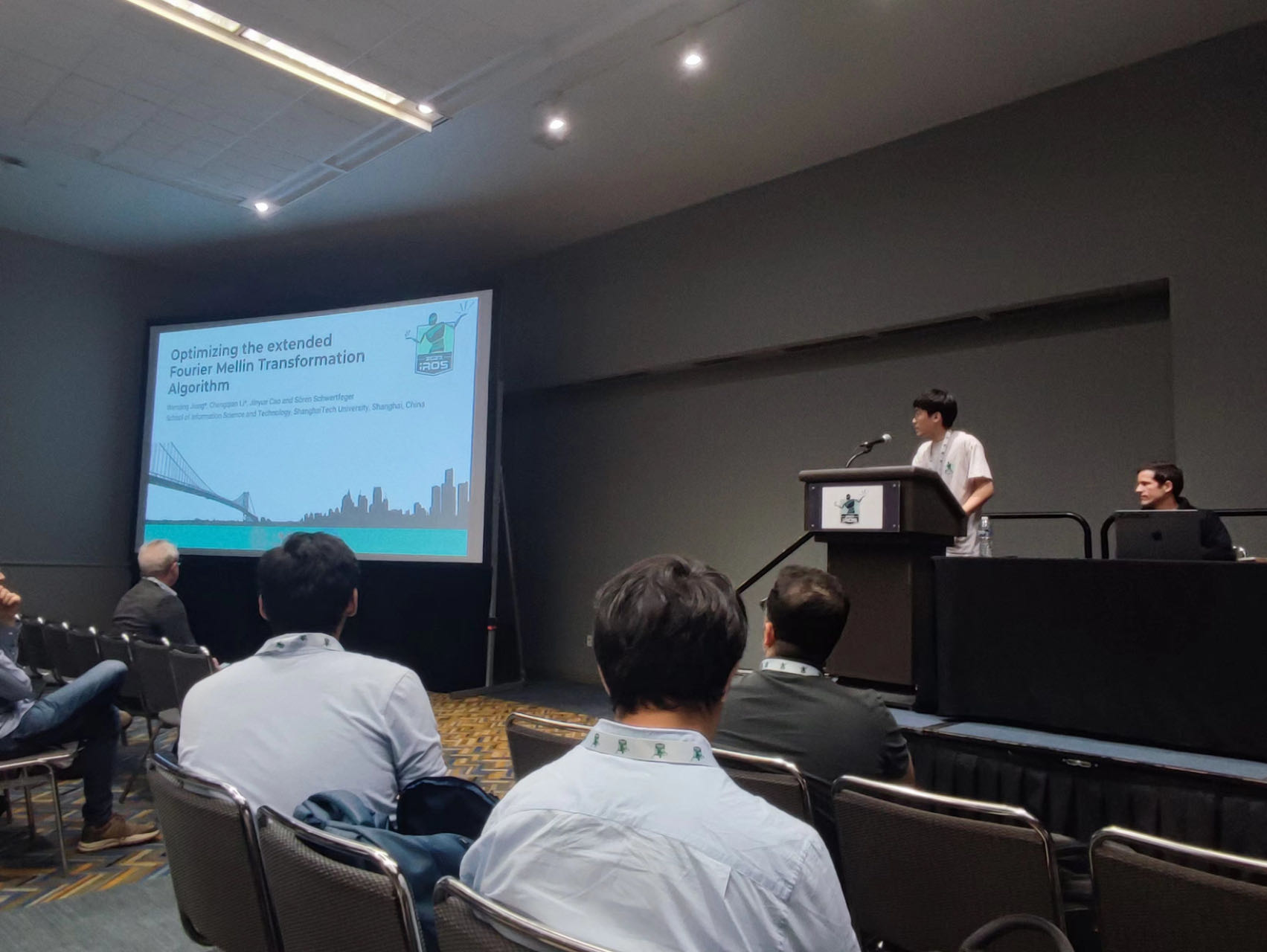
10月2日,我在v-slam(视觉即时定位与建图)单元根据我们提出的Optimizing the extended Fourier Mellin Transformation Algorithm进行了口头汇报。optimizing eFMT(o-eFMT)是一种基于图像的视觉里程计算法,在傅里叶梅林变换算法(FMT)的基础上,实现了在多深度平面场景的相机位姿估计。 o-eFMT在eFMT的基础上增加了放缩能量向量,旋转能量向量和平移能量向量的不确定度估计,使用更加简洁的模式匹配方法来提高算法效率。使用局部的VO后端优化来提高算法精度。该算法的源代码内容和部分模拟数据集发布于:https://github.com/STAR-Center/o-eFMT,真实数据集也在论文中进行了公开。

在此之后,我对我们的工作进行了海报展示。在海报展示过程中,有很多研究者表达了对图像频域领域的兴趣。许多同行对我们的工作表示了认同,并希望能使用我们的开源项目进行进一步的研究。不仅如此,很多海外学者对上海科技大学这所充满活力的新兴的学校充满好奇,向我询问了很多关于学校学生的培养方式和我的自身感受。我结合切身经历,向他们讲述了我们学校国际化,高水平等办学理念和先进思想。
有趣的是,我在会议现场遇到了我们MARS实验室毕业,现在在德国攻读博士的元祎君学长。自从他硕士毕业之后,我们也只是在组会上短暂的线上交流过。元学长很热情地把我介绍给了他在德国的导师,并和我讲述了他现在的研究方向,这两年多在科研上的心得体验,以及自己在德国的所见所闻。

10月3号和4号,我在报告厅学习了来自密歇根大学、上海交通大学、卡内基梅隆大学、塔夫茨大学以及苏黎世联办理工大学等世界顶尖学府的机器人定位工作,主要关注了视觉与激光定位中,对传感器数据的处理方法、数据集采集和可视化工作。晚宴时,在福特公司的博物馆会场中,我们与许多机器人领域的研究者一起进行交流分享。
除此之外,我还在机器人产品区见到了很多新奇的机器人。有海龟机器人,氢气球机器人,机械狗,软体机器人等。看着会场各式各样的机器人,让我再一次感受到了机器人的高趣味性和快速发展的必然性。


这次参加IROS 2023是一次令人难忘的经历,给我留下了深刻的感受和宝贵的收获。通过聆听会议报告,我了解到了不同方向、不同领域的发展现状,也从他们的研究成果中学到了许多新的想法和技术;通过向参会人员展示自己的论文,我也意识到了自己在工作中的一些不足。这次学术会议激发了我进一步深入研究移动机器人领域的热情。我意识到这个领域中仍然存在许多未解决的问题和挑战,同时也有巨大的机会进行创新和突破。我对未来的研究方向和实践应用充满了期待,并计划将会议上学到的知识和经验应用到我的研究和工作中。最后,十分感谢上海科技大学和Sören Schwertfeger老师对我的培养和支持,让我有机会参加IROS 2023。
 沪公网安备 31011502006855号
沪公网安备 31011502006855号
