
2019届IEEE国际机器人与仿生学会议(ROBIO)于2019年12月6日至8日在云南大理举办。本次会议共收到739篇论文投稿,其中403篇论文被接收。我校信息学院自动化与机器人中心(STAR Center)的Sören Schwertfeger教授以及Andre Rosendo教授课题组参加了此次会议并有五篇论文被会议接收(Sören Schwertfeger课题组共2篇,Andre Rosendo课题组共3篇)。其中,由硕士研究生何振鹏、博士研究生侯佳维和Sören Schwertfeger教授提交的论文“Furniture Free Mapping using 3D Lidars”荣获ROBIO 2019最佳论文入围奖。
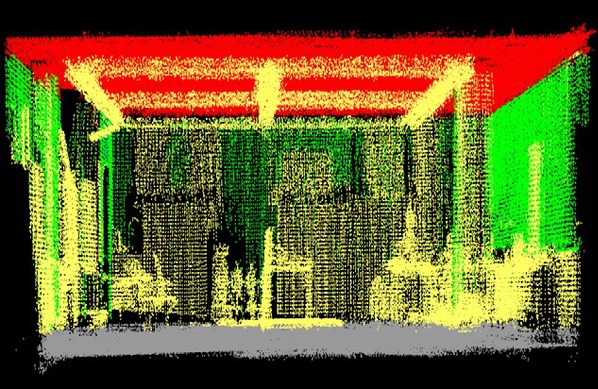
在“Furniture Free Mapping using 3D Lidars”这篇论文中,作者提出了一个基于即时定位与地图构建(SLAM)的建图方法。这个方法能够将每帧激光点云分割为墙壁、家具、门、地面和屋顶等点并且建立一个没有家具的二维栅格地图和三维点云地图。该论文由研究生何振鹏进行现场演讲,全文可参见链接:https://arxiv.org/pdf/1911.00663。
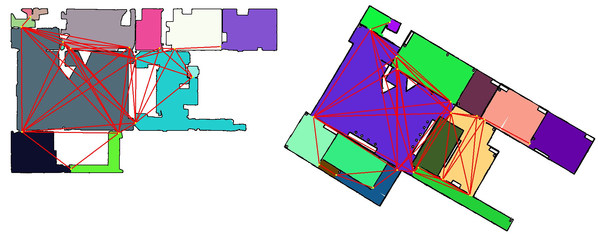
Sören Schwertfeger教授的自主移动机器人实验室(MARS Lab)提交的第二篇论文是“Fast 2D Map Matching Based on Area Graphs”。这篇论文由博士研究生侯佳维、硕士研究生旷皓飞以及Sören Schwertfeger合著。他们提出了一种称为“区域图”的拓扑地图表示方法。这种拓扑地图表示方法可以用于机器人的定位或者将机器人生成的2D地图与CAD地图进行匹配,并将语义信息合并到机器人地图中。研究生旷皓飞作为代表现场演讲,全文可参见链接:https://arxiv.org/pdf/1911.07432。
Andre Rosendo教授的灵机实验室(LIMA Lab)一共有三篇论文被接收。研究生朱望舒和Andre Rosendo教授的论文“Influences of Neural Network Structures on an Efficient Reinforcement Learning Policy Search”讨论了不同的神经网络结构(层、神经元、计算机内核数)对Double-Inverted Pendulum模拟中Black-DROPS(黑盒数据高效型机器人策略搜索)算法速度的影响。他们发现,每次迭代的计算时间受这些选项更改的影响很大,并且最佳的结构大小是存在的。这篇论文在会议中由学生朱望舒进行演讲。

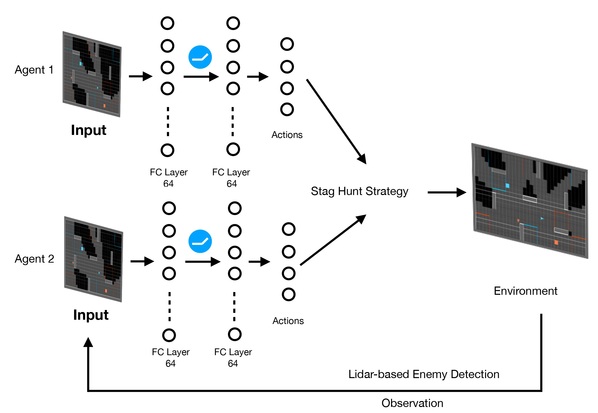
灵机实验室的第二篇论文是“Tactical Reward Shaping: Bypassing Reinforcement Learning with Strategy-Based Goals”。作者为研究生张亦正和Andre Rosendo教授。在ICRA-DJI RoboMaster AI挑战赛的背景下,本文报告说,使用深度强化学习(DRL)通过以一种明智的方式设定比赛的目标,而不是试探性地尝试多个小时的解决方案,DRL模拟可以迅速收敛为制胜战略。这篇论文由张亦正在会议上进行演讲,全文可参见链接:https://arxiv.org/pdf/1910.03144。
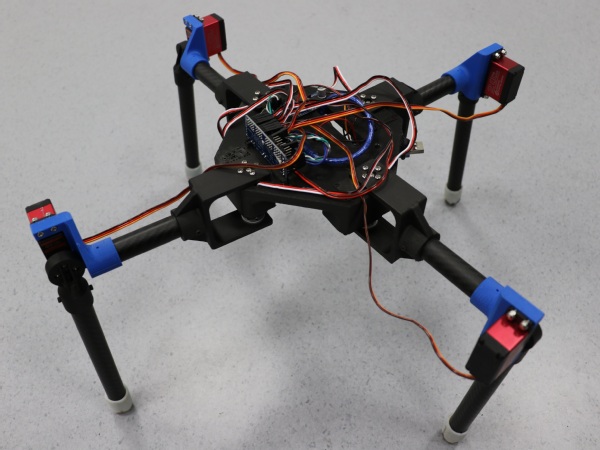
研究生朱佳会、荣春燕以及Andre Rosendo教授的论文“Probabilistic Inferences on Quadruped Robots: An Experimental Comparison”是灵机实验室的第三篇论文。这篇论文比较了贝叶斯优化(BO)和协方差矩阵适应进化策略(CMA-ES),以用于解决四足机器人十维步态参数搜索问题。这篇论文发现这两种方法仅需130次迭代即可找到最佳解决方案。本文由学生朱佳会进行演讲。

 沪公网安备 31011502006855号
沪公网安备 31011502006855号


