
马格德堡是个舒适的小城,虽为萨克森-安哈尔特州首府,但20万的人口分布在这样一个中世纪古城里,确实显得冷冷清清。而与之形成鲜明对比的,不仅仅是上海熙攘的人群,高耸的钢筋混凝土和快节奏生活,还有我们本来那颗急躁的心。这次比赛的准备时间并不充裕,虽然在学校里我们为此搭建了等比例缩小的比赛场地,也按预期目标测试了各项环节,然而机器人比赛不像ACM和各类黑客马拉松,不仅有软件上的各类BUG需要解决,同时还要考虑机器人硬件的鲁棒性。尤其是长途跋涉,路上的颠簸非常容易对机器人造成意外的损伤。


晚饭后,我们便开始组装机器人,需要吸取教训的是,出发当天因为机器人出故障导致打包匆匆,有些次要的零部件未带,不过幸好有替代方案解决问题。另外,长途的震动导致电机螺丝几乎全部松动,甚至有一些已脱落。忙到凌晨过后,大家终于可以回去睡觉。
比赛场地坐落在马格德堡Elbauenpark公园旁边,我们到时,已有不少队伍在准备比赛了。由于我的任务是机器人硬件和机器人轨迹估计与建图,在学校里已经完成了几乎所有的测试,因此机器人让给了其他队友测试他们的项目。作为队里相对比较闲的人员,我被拉去当每队出一人的裁判。RoboCup救援赛分为Maneuvering,Mobility,Dexterity和Exploration四个部分,其中Maneuvering是最基础的测试场地,机器人在这些场地里遥控或者自主驾驶,来回次数越多则得分越高。Mobility测试救援机器人的移动能力,基本都是一些特别复杂的地形,而Dexterity测试机器人机载机械臂的灵活性能。由于我们侧重小型机器人,并未装备机械臂,因此没有选测Mobility和Dexterity。Exploration是四项中最考验算法的测试,机器人需要自主或遥控驶完全程,并进行建图和识别危险物,热源等任务。作为裁判,我虽然没有更多的时间陪着自己组的机器人调试和比赛。所幸的是,不同组的机器人都各有所长,裁判过程并不乏味,每队都有各自的独特优势,比如如下左侧图的队伍,他们简单的使用了4个轮子,采用大功率驱动,虽然丧失了一定的复杂地形应对能力,但帮助他们在

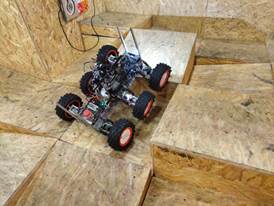
来回单圈比赛中争取不少的分数。右图是六轮机器人,和前面的一样,都抛弃了传统救援机器人的履带式结构,能让他们在沙地和碎石地形中有更好的移动能力。
在前两天的比赛结束后,我终于从裁判的角色中脱身出来。由于比赛场地中各个队伍都在使用无线网络,导致信道不足,我们临时换上之前准备好的有线传输,即将电源换成220v直流转换模块,信号则通过电力猫在220v交流上传输,这样只需一根220v电线即可完成电能和通讯信号的传输。而在Exploration的建图任务中,我们的建图效果并不理想,但在单独测试时能够工作,后来分析是由于机器人机载计算机算力不够,测试时因为不开传感器,用的是事先录制好的数据集,cpu压力较小,当传感器和建图算法同时运算时就导致负载较大,算法无法在指定时间内得到优化后的值。不过相比其他队伍都采用激光雷达建图,我队的相机具有低成本和低功耗地优点,这样的建图效果尚算可接收。
最后一天的总决赛我们没能参加,因为机器人体积的原因,我们相比大型机器人其实非常吃亏,不过我们的研究方向就是小型救援机器人的自主,这种在比赛中自己制造困难的精神也许值得骄傲,但不得不承认的是,我们的自主建图还有不少路要走。基于相机这种限制感知下的建图,定位和路径规划本来就处于学术前沿。长路漫漫,吾将上下而求索。


 沪公网安备 31011502006855号
沪公网安备 31011502006855号


